Einstellungen im CoE-Register
(Master TwinCAT 2.11 R3)
Die hier angegebenen Daten sind beispielhaft für einen Servomotor AM3121-0200-0001, der Firma Beckhoff Automation aufgeführt. Bei anderen Motoren und je nach Applikation können die Werte variieren.
Inhaltsverzeichnis |
|---|
Einfügen der Motor XML-Datei
 | Download der EL72x1 Motor XML Dateien Die Motor XML-Dateien können im Download-Bereich auf der Beckhoff Website herunter geladen werden. |
Zur Erleichterung der Inbetriebnahme der Servoklemme EL72x1 wurden für die Servomotoren, die von der EL72x1 unterstützt werden, Motor XML Dateien erstellt. Diese XML Dateien können im System Manager eingelesen werden. Anschließend sind alle nötigen CoE Parameter bzw. DS402 Parameter passend eingestellt.
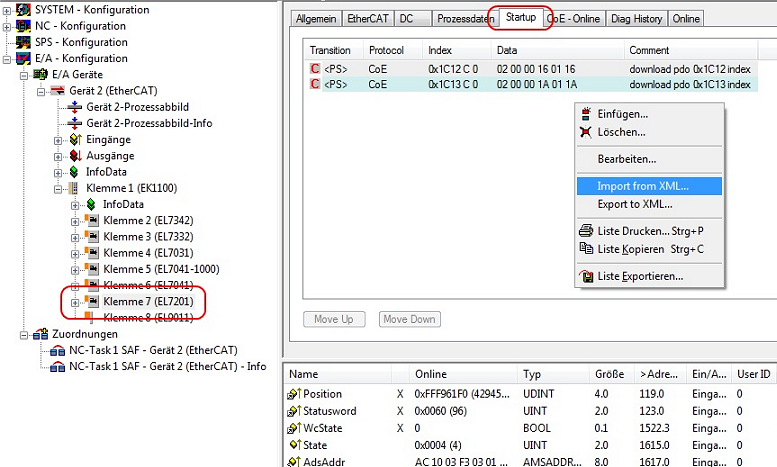
- Zum Einlesen der Motor XML Datei wählen Sie die EL72x1 aus und betätigen die Registerkarte Startup. Klicken Sie mit der rechten Maustaste in das leere Feld und wählen Sie Import from XML...(siehe Abb. Importieren der Motor XML Datei).
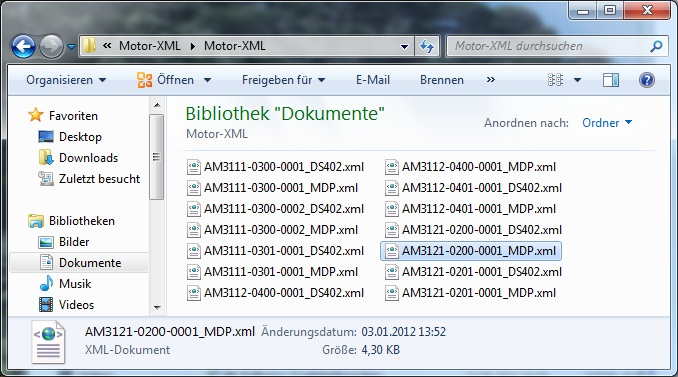
- Wählen Sie die passende Motor XML Datei zum angeschlossenen Motor (siehe Abb. Auswahl der richtigen Motor XML Datei)
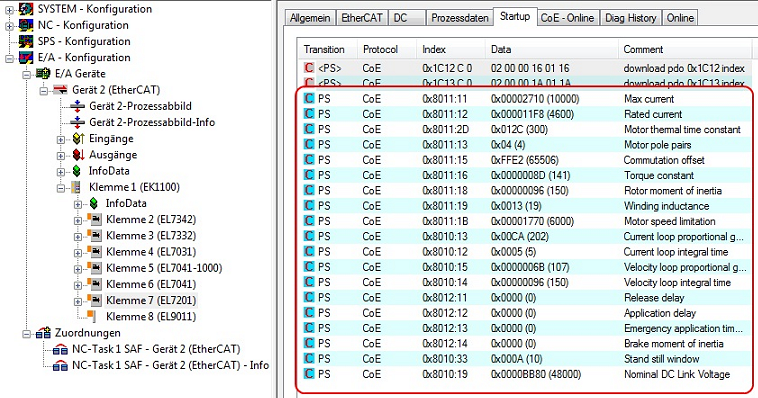
- Anschließend sind alle nötigen Parameter eingestellt, um den Motor in Betrieb zu nehmen (siehe Abb. CoE Parameter der Motor XML Datei).
| Startup Liste Sollten applikationsabhängige Feineinstellungen nötig sein, sollten diese ebenfalls im Startup geändert werden. Andernfalls werden die geänderten Einstellungen beim nächsten Hochlauf der Klemme überschrieben. |
Anpassung von Strom und Spannung
Hinweis | |
Überhitzung des Motors möglich! Um den angeschlossenen Motor nicht zu überhitzen, ist es wichtig, die Spannung die von der Servoklemme ausgegeben wird der tatsächlich angeschlossenen Spannung anzupassen. |
Dazu muss der Index 0x8010:19 "Nominal DC Link Voltage" der angeschlossenen Spannung passend eingestellt werden
Einstellung weiterer Parameter
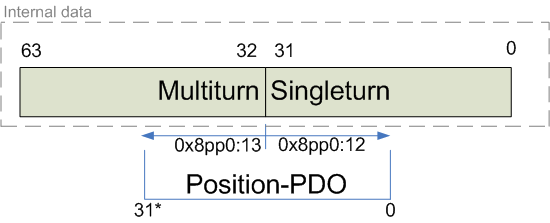
Singleturn Bits (MDP742: Index 0x8000:12 / DS402: Index 0x2010:12) / Multiturn Bits (MDP742: Index 0x8000:13 / DS402: Index 0x2010:13)
Hier kann der Anwender selber festlegen, wie viele Singleturn Bits und Multiturn Bits von der Klemme angezeigt werden sollen. Insgesamt stehen der Klemme 32 Bits zur Verfügung. Diese 32 Bits können beliebig aufgeteilt werden.
Standardmäßig sind 20 Singleturn Bits und 12 Multiturn Bits eingestellt.
Singleturn Bits: Anzahl der Bits, mit denen eine Rotordrehung aufgelöst wird.
Multiturn Bits: Nach einer Rotordrehung werden die Multiturn Bits um eins hochgezählt.
Hinweis | |
Überhitzung des Motors möglich! Wird die Anzahl der Singleturn Bits geändert, muss der Skalierungsfaktor in der NC angepasst werden! |
Automatic gain control
Jeder Resolver weist eine kleine Differenz zwischen der Amplitude der Sinus- und der Cosinus-Spur auf (siehe Abb. Resolver gain adjustment). Die Abweichung ist u. a. von der Streuung der Bauteile abhängig und kann von Motor zu Motor variieren.
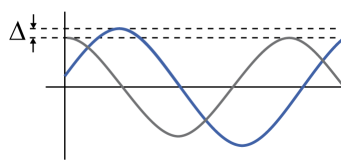
Diese kleine Differenz in den Resolver-Amplituden wird von der EL72x1 automatisch korrigiert, wenn die Funktion "Automatic gain control" eingeschaltet ist. Die Korrektur braucht eine gewisse Zeit, etwa 100 Umdrehungen. Das bedeutet, dass die Genauigkeit in dieser Zeit minimal geringer ist, als nach der Korrektur.
Möchte man die minimal geringere Ungenauigkeit am Anfang verhindern, kann man in der Inbetriebnahmephase, nach etwa 100 Umdrehungen, den von der Klemme ermittelten Korrekturfaktor "Automatic resolver gain value" (MDP742: Index 0x9008:12 / DS402: Index 0x2058:12) auslesen und in "Resolver gain adjustment" (MDP742: Index 0x8008:12 / DS402: Index 0x2018:12) übertragen. Mit dem dort eingetragenen Wert fängt die Korrektur immer an. Dabei ist zu beachten, dass sich der Wert von Motor zu Motor ändert. Sollte der Motor getauscht werden, muss der Vorgang wiederholt werden.
Die Funktion "Automatic gain control" kann mit "Enable automatic gain control" (MDP742: Index 0x8008:02 / DS402: Index 0x2018:02) ein- bzw. ausgeschaltet werden.
Torque limitation (MDP742: Index 0x7010:0B / DS402: Index 0x6072:0)
Limitiert den Strom / das Drehmoment auf diesen Wert. Der Wert wird in 1000stel vom "rated current" angegeben.
Integralanteil Geschwindigkeitsregler Tn (MDP742: Index 0x8010:14 / DS402: Index 0x2002:14)
Die hier angegebenen Werte sind beispielhaft und haben in den meisten Fällen zu sehr guten Ergebnissen geführt. Es kann aber je nach Applikation vorkommen, dass andere Werte zu besseren Ergebnissen führen.
- Verringern Sie den Wert, bis der Motor anfängt leicht zu schwingen. Erhöhen Sie diesen Wert anschließend um 10%.
Proportionalanteil Geschwindigkeitsregler Kp (MDP742: Index 0x8010:15 / DS402: Index 0x2002:15)
Die hier angegebenen Werte sind beispielhaft und haben in den meisten Fällen zu sehr guten Ergebnissen geführt. Es kann aber je nach Applikation vorkommen, dass andere Werte zu besseren Ergebnissen führen.
- Erhöhen Sie den Wert, bis der Motor anfängt leicht zu schwingen. Verringern Sie diesen Wert anschließend auf 80%.