Einstellungen in der NC
(Master TwinCAT 2.11 R3)
Die hier angegebenen Daten sind beispielhaft für einen Servomotor AM3121-0200-0001, der Firma Beckhoff Automation aufgeführt. Bei anderen Motoren und je nach Applikation können die Werte variieren.
Inhaltsverzeichnis |
|---|
Für die Inbetriebnahme mit der NC sind einige wichtige Parameter notwendig. Diese sollten vor der Inbetriebnahme wie folgt eingestellt werden. Grundlegend für die Einstellung der folgenden Parameter ist die eingestellte Einheit, in der die NC arbeiten soll. Bei den folgenden Parametern wurde zu Grunde gelegt, dass eine Umdrehung 360° entspricht.
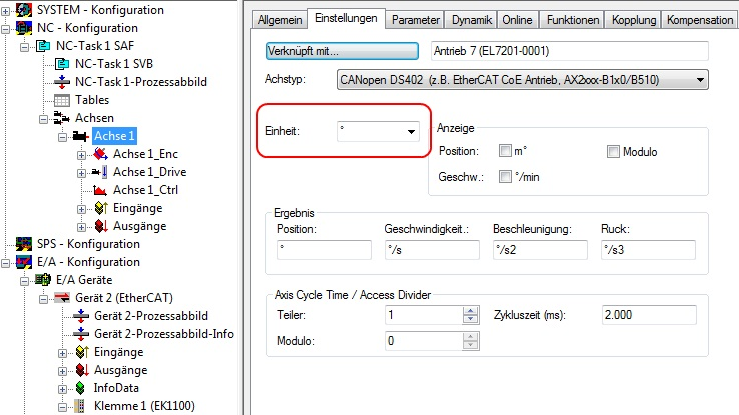
Definition der Einheit
Die Einheit kann in der Registerkarte Einstellungen der Achse definiert werden.
Auswahl der max. Geschwindigkeit
Die maximale erlaubte Geschwindigkeit errechnet sich anhand der maximalen Motorgeschwindigkeit (Typenschild) und der zu verfahrenden Distanz. Hier bezogen auf 360° pro Sekunde.


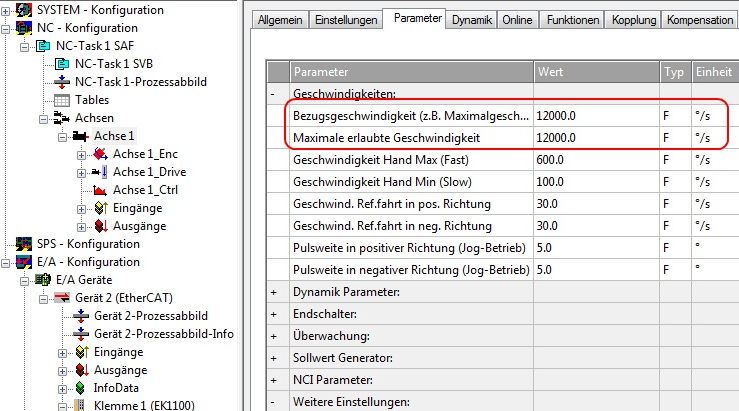
Die Bezugsgeschwindigkeit ist der maximalen erlaubten Geschwindigkeit gleichgestellt.
Darunter können bei Belieben noch die max. und min. Geschwindigkeit für den Handbetrieb der NC eingestellt werden.
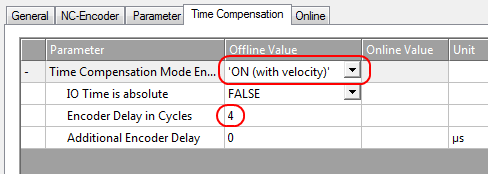
Totzeitkompensation
Die Totzeitkompensation der Achse kann in der Registerkarte Time Compensation der Encoder-Einstellungen Achse1_ENC eingestellt werden. Sie sollte theoretisch 3 Zyklen der NC-Zykluszeit betragen, besser haben sich jedoch 4 Zyklen der NC-Zykluszeit erwiesen. Dazu sollten die Parameter Time Compensation Mode Encoder auf ‚ON (with velocity)‘ und Encoder Delay in Cycles auf 4 eingestellt sein.
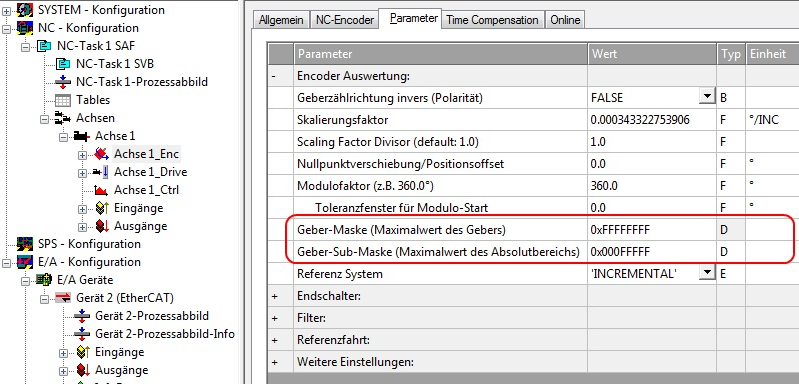
Einstellung der Geber-Maske
In der Registerkarte Parameter der Encodereinstellungen Achse1_ENC können die maximalen Werte für die Geber-Maske eingestellt werden. Die EL72x1 stellt für den Geber maximal 32 Bit zur Verfügung.
Mit dem Parameter Geber-Maske (Maximalwert des Gebers) kann die Anzahl der Bits eingestellt werden, die maximal zur Verfügung stehen sollen. Im Default steht hier 0xFFFF FFFF, das entspricht 32 Bit (20 Singleturn Bits und 12 Multiturn Bits). Berechnen lässt sich das mit der folgenden Formel.

Der Parameter Geber-Sub-Maske (Maximalwert des Absolutbereichs) gibt an, wie viele Bits vom Maximalwert des Gebers Singleturn Bits sein sollen. Im Default sind es 20 (und damit 12 Multiturn Bits). Das kann mit folgender Formel berechnet werden.

Ein weiteres Rechenbeispiel mit 13 Singleturn Bits und 8 Multiturn Bits.


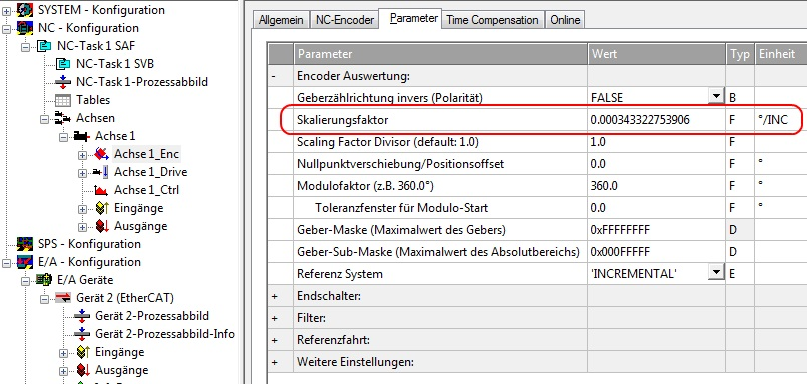
Skalierungsfaktor
Den Skalierungsfaktor können Sie ändern, wenn Sie in der NC "Achse 1_Enc" und die Registerkarte "Parameter" auswählen (siehe Abb. Skalierungsfaktor einstellen). Der Wert lässt sich mit den unten angegebenen Formeln berechnen. Bei der Berechnung wird zur Grunde gelegt, dass eine Umdrehung 360° entspricht.
In die Berechnung des Skalierungsfaktors fließt die Anzahl der Singleturn Bits mit ein. Wie bereits beschrieben, rechnet die EL72x1 im Default mit 20 Singleturn Bits. Mit diesem Wert wird im Folgenden auch der Skalierungsfaktor berechnet. Sollte sich der Wert der Singleturn Bits ändern, muss der Skalierungsfaktor angepasst werden.
Berechnung des Skalierungsfaktors:

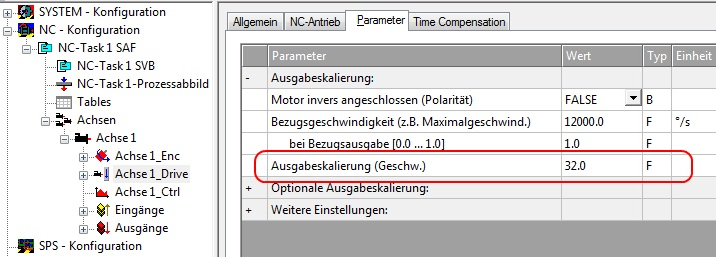
Ausgabe Skalierung
Bitte tragen Sie in der Registerkarte Parameter der Drive-Einstellungen, beim Parameter Ausgabeskalierung (Geschw.) den Wert 32 ein.
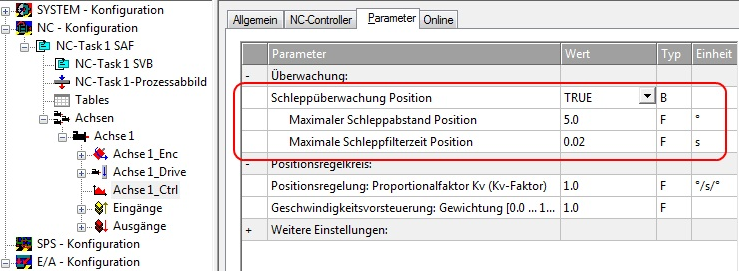
Schleppüberwachung Position
Die Schleppabstandsüberwachung kontrolliert, ob der aktuelle Schleppabstand einer Achse einen Grenzwert überschreitet. Als Schleppabstand wird die Differenz zwischen ausgegebenem Sollwert (Stellgröße) und dem rückgemeldeten Istwert bezeichnet. Sind die Parameter der Klemme noch unzureichend eingestellt, kann es dazu führen, dass beim Verfahren der Achse die Schleppabstandsüberwachung einen Fehler ausgibt. Bei der Inbetriebnahme kann es deswegen eventuell von Vorteil sein, wenn man die Grenzen der Schleppüberwachung Position etwas erhöht.
Hinweis | |
Beschädigung von Geräten, Maschinen und Peripherieteilen möglich! Bei der Parametrierung der Schleppüberwachung können durch Einstellen zu hoher Grenzwerte Geräte, Maschinen und Peripherieteile beschädigt werden! |
Inbetriebnahme des Motors mit der NC
- Sind die Parameter eingestellt, dann ist der Motor prinzipiell betriebsbereit. Einzelne weitere Parameter müssen der jeweiligen Applikation angepasst werden.
- Um die Achse in Betrieb zu nehmen, aktivieren Sie die Konfiguration (Ctrl+Shift+F4), markieren die Achse, wählen die Registerkarte Online aus und geben unter Set die Achse frei.
- Setzen Sie alle Häkchen und stellen Sie Override auf 100% (siehe Abb. Achse freigeben). Anschließend kann die Achse bewegt werden.
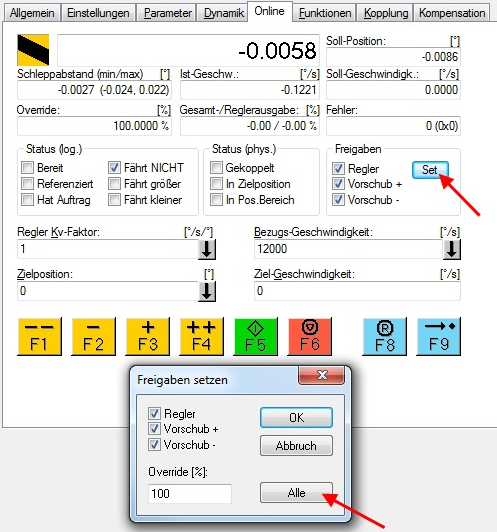
Sie können nun die Achse mit Hilfe der Funktionstasten F1, F2 (Rückwärts) und F3, F4 (Vorwärts) bewegen.
Sie können hier den Kv Faktor verstellen und sich somit an einen passenden Faktor herantasten. Stellen Sie zunächst 0 ein, um die richtige Bezugsgeschwindigkeit einzustellen. Wie die Bezugsgeschwindigkeit berechnet wird, entnehmen Sie bitte dem Kapitel "Auswahl der max. Geschwindigkeit". Die Berechnung gibt einen relativ genauen Wert an, Sie müssen diesen Wert gegebenenfalls noch etwas korrigieren. Verfahren Sie dazu den Motor mit einem Kv Faktor von 0 und achten Sie darauf, dass die Ist-Geschwindigkeit mit der Soll-Geschwindigkeit übereinstimmt.
Eine andere Möglichkeit besteht darin, unter der Registerkarte Funktionen, die Achse anzusteuern. Nachfolgend ein Beispiel dazu.
- Wählen Sie als Starttyp Reversing Sequence.
- Geben Sie eine gewünschte Zielposition2 an, z. B. 12000°.
- Geben Sie eine gewünschte Zielgeschwindigkeit an, z. B. 12000°/s.
- Geben Sie eine gewünschte Zielposition1 an, z. B. 0°.
- Geben Sie den gewünschte Idle Time an, z. B. 2 s.
- Wählen Sie Start.
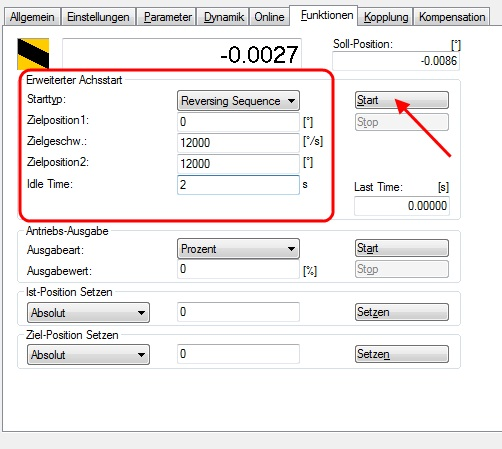
Nun dreht sich Ihr Motor auf die Position 2, verbleibt dort 2 s und fährt wieder auf die Position 1. Das wird wiederholt, bis Sie das mit "Stop" beenden.