Inbetriebnahme ohne die NC, Status-Wort/Control-Wort
(Master: TwinCAT 2.11 R3)
Die Betriebsarten CST, CSTCA, CSV und CSP lassen sich grundsätzlich auch ohne die TwinCAT NC betreiben.
Endstufe freigeben über Control-Wort
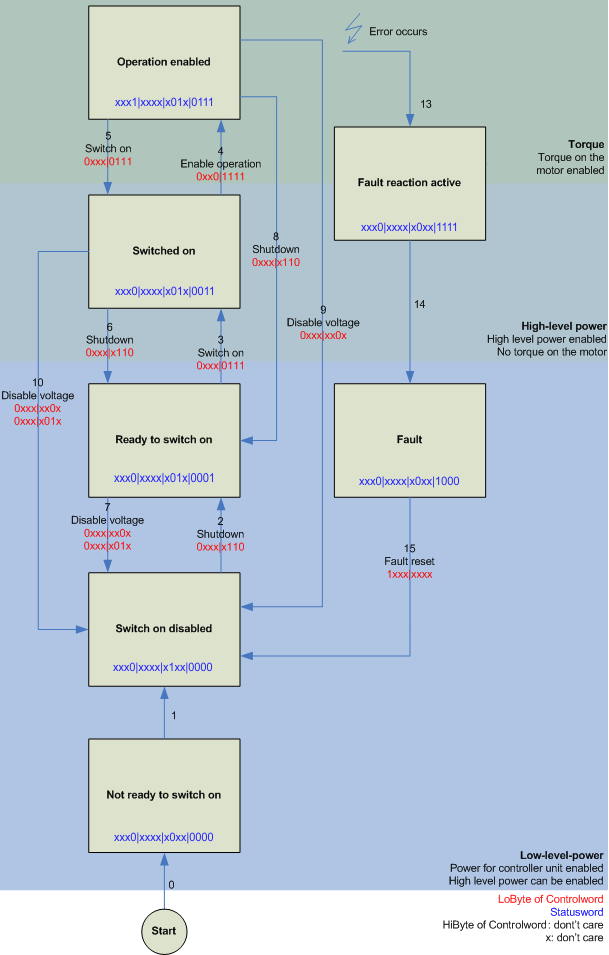
Für jede Betriebsart ist es notwendig, die Endstufe freizugeben. Dazu müssen über die PLC im Control-Wort (MDP742 / DS402) die folgenden Werte in der angegeben Reihenfolge eingeben werden (siehe Abb. DS402 State Machine).
Im Status-Wort (MDP742 / DS402) werden die entsprechenden Statusmeldungen ausgegeben.
0hex
80hex (Fault reset)
6hex (Shutdown)
7hex (Switch on)
Fhex (Enable operation)
CST - cyclic synchronous torque
Im Index 0x7010:03 Modes of operation (MDP) oder Index 0x6060:0 Modes of operation (DS402) muss Cyclic synchronous torque mode gewählt werden. In den jeweiligen Prozessdaten sollte ebenfalls das Predefined PDO Assignment: 'Cyclic synchronous torque mode (CST)' gewählt werden (siehe CoE-Prozessdaten oder DS402-Prozessdaten). Anschließend muss die Konfiguration neu geladen werden, um die Auswahl zu übernehmen.
Unter dem Index 0x6010:03 Modes of operation display (MDP) oder dem Index 0x6061:0 Modes of operation display (DS402) kann überprüft werden, in welchem Modus sich die Servoklemme tatsächlich befindet.
Über die PLC kann in der Variable Target torque ein definiertes Moment eingestellt werden, auf dem die Servoklemme regeln soll. Das Moment wird in 1000stel des Nennstroms angegeben. Sollte dort beispielsweise 1000dec angegeben werden, entspricht das dem eingestellten Index 0x8011:12 Rated current (MDP) bzw. Index 0x6075:0 Motor rated current (DS402). Der Wert 1dec entspricht einem 1000stel des Nennstroms.
CSTCA - cyclic synchronous torque with commutation angle
Im Index 0x7010:03 Modes of operation (MDP) oder Index 0x6060:0 Modes of operation (DS402) muss Cyclic synchronous torque mode with commutation angle gewählt werden. In den jeweiligen Prozessdaten sollte ebenfalls das Predefined PDO Assignment: 'Cyclic synchronous torque mode with commutation angle mode (CSTCA)' gewählt werden (siehe CoE-Prozessdaten oder DS402-Prozessdaten). Anschließend muss die Konfiguration neu geladen werden, um die Auswahl zu übernehmen.
Unter dem Index 0x6010:03 Modes of operation display (MDP) oder dem Index 0x6061:0 Modes of operation display (DS402) kann überprüft werden, in welchem Modus sich die Servoklemme tatsächlich befindet.
Über die PLC kann in der Variable Target torque ein definiertes Moment eingestellt werden, auf dem die Servoklemme regelt und in der Variable Commutation angle kann der Winkel angegeben werden, der mit dem eingestellten Moment gehalten werden soll. Das Moment wird in 1000stel des Nennstroms angegeben. Sollte dort beispielsweise 1000dec angegeben werden, entspricht das dem eingestellten Index 0x8011:12 Rated current (MDP) bzw. Index 0x6075:0 Motor rated current (DS402). Der Wert 1dec entspricht einem 1000stel des Nennstroms.
Der Wert für den Winkel muss umgerechnet werden, 65536dec entsprechen 360°.
CSV - cyclic synchronous velocity
Im Index 0x7010:03 Modes of operation (MDP) oder Index 0x6060:0 Modes of operation (DS402) muss Cyclic synchronous velocity gewählt werden. In den jeweiligen Prozessdaten sollte ebenfalls das Predefined PDO Assignment: 'Cyclic synchronous velocity mode (CSV)' gewählt werden (siehe CoE-Prozessdaten oder DS402-Prozessdaten). Anschließend muss die Konfiguration neu geladen werden, um die Auswahl zu übernehmen.
Unter dem Index 0x6010:03 Modes of operation display (MDP) oder dem Index 0x6061:0 Modes of operation display (DS402) kann überprüft werden, in welchem Modus sich die Servoklemme tatsächlich befindet.
Über die PLC kann in der Variable Target velocity 0x7010:06 (MDP) oder 0x60FF:0 (DS402) eine definierte Drehzahl eingestellt werden, auf dem die Servoklemme regeln soll. Der konstante Wert Velocity encoder resolution im CoE Objekt 0x9010:14 (MDP) oder 0x6090:0 (DS402) entspricht 1 Umdrehung pro Sekunde. Wird dieser Wert in Target velocity eingetragen, dreht der Motor 1 Umdrehung / s, ein entsprechendes Vielfaches vom Wert Velocity encoder resolution bei Target velocity eingtragen, erhöht die Geschwindigkeit.
CSP - cyclic synchronous position
Im Index 0x7010:03 Modes of operation (MDP) oder Index 0x6060:0 Modes of operation (DS402) muss Cyclic synchronous position gewählt werden.
In den jeweiligen Prozessdaten sollte ebenfalls das Predefined PDO Assignment: 'Cyclic synchronous position mode (CSP)' gewählt werden (siehe CoE-Prozessdaten oder DS402-Prozessdaten). Anschließend muss die Konfiguration neu geladen werden, um die Auswahl zu übernehemen.
Unter dem Index 0x6010:03 Modes of operation display (MDP) oder dem Index 0x6061:0 Modes of operation display (DS402) kann überprüft werden, in welchem Modus sich die Servoklemme tatsächlich befindet.
Über die PLC kann in der Variable Target position 0x7010:05 (MDP) oder 0x607A:0 (DS402) eine definierte Position eingestellt werden, auf die der Motor fahren soll. Bei der Berechnung der Position wird der berechnete Skalierungsfaktor zugrunde gelegt. Der in der Variable Target position eingetragene Wert muss mit dem berechneten Skalierungsfaktor multipliziert werden.