Konfiguration der wichtigsten Parameter - Einstellungen im CoE-Register
Die hier angegebenen Daten sind beispielhaft für einen Stepper Motor AS 1050-0120 aufgeführt. Bei anderen Motoren und je nach Applikation können die Werte variieren.
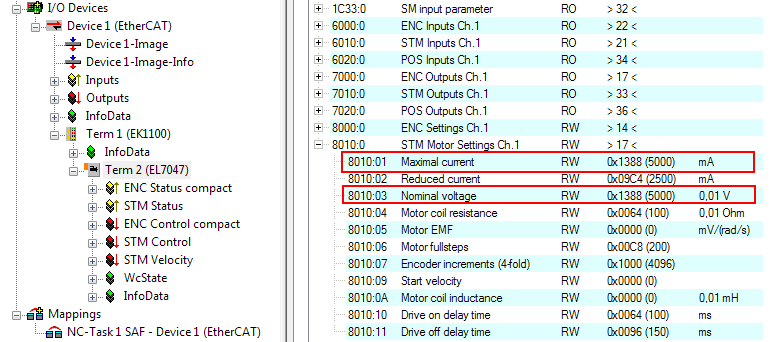
Anpassung von Strom und Spannung
Hinweis | |
Überhitzung des Motors möglich! Um den angeschlossenen Motor nicht zu überhitzen, ist es wichtig den Strom und die Spannung, die vom Stepperinterface ausgegeben wird, dem Motor anzupassen. |
Dazu müssen im CoE-Register der Index 0x8010:01 "Maximal current" und der Index 0x8010:03 "Nominal voltage" passend eingestellt werden (siehe Abb. "Anpassung von Strom und Spannung").
Im Index 0x8010:02 kann der Reduced current eingestellt werden. Dadurch wird der Spulenstrom im Stillstand (und damit auch die Verlustleistung) reduziert. Es ist zu beachten, dass sich damit auch das Drehmoment reduziert.
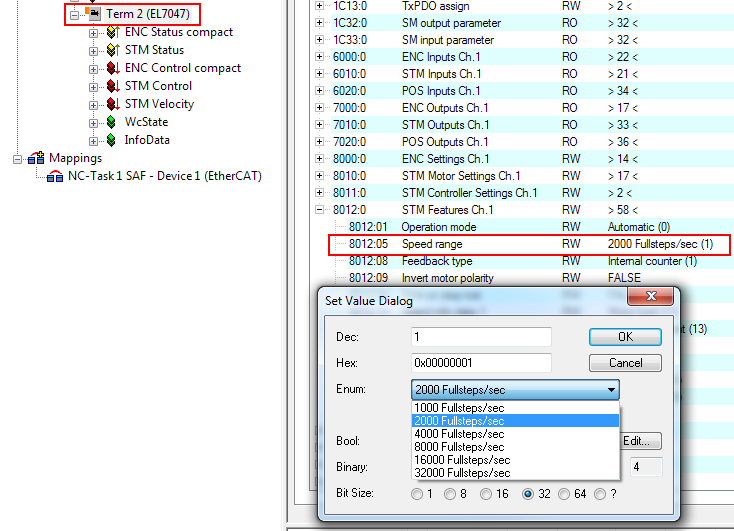
Auswahl der Grundfrequenz
Das Microstepping ist fest auf 1/64 eingestellt und kann nicht verändert werden. Es kann jedoch die Grundfrequenz verändert werden (default: 2000). Dazu markieren Sie die Klemme und wählen die Registerkarte CoE-Online aus. Mit einem Doppelklick auf den Index 0x8012:05 "Speed range" können Sie die Grundfrequenz verändern (Abb. "Grundfrequenz einstellen").
 | Anpassung der Bezugsgeschwindigkeit Die Grundfrequenz hängt unmittelbar mit der Bezugsgeschwindigkeit der TwinCAT NC zusammen, so dass die Bezugsgeschwindigkeit immer an eine Veränderung der Grundfrequenz angepasst werden muss. |
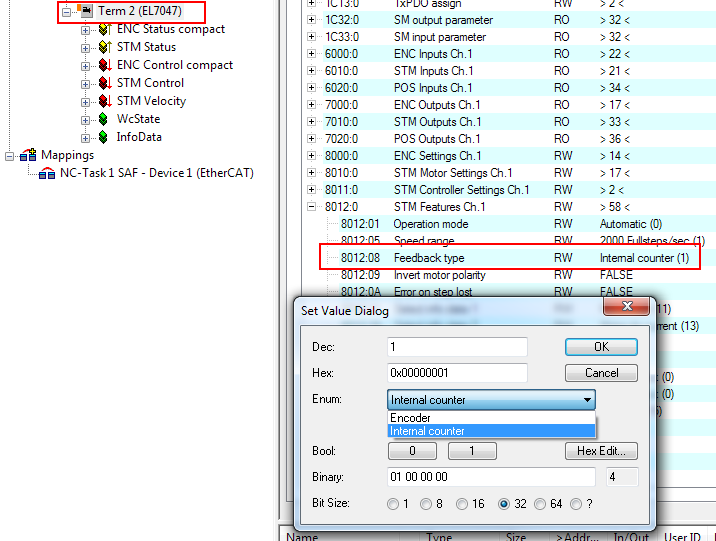
Auswahl des Feedbacksystems (Nur beim Modul mit Encoder-Anschlüssen)
Beim Feedbacksystem stehen zwei Möglichkeiten zur Auswahl:
- Encoder: Externen Encoder zur Positionsrückführung nutzen
- Internal Counter (default): Internen Zähler zur Positionsrückführung nutzen
| CoE "Feedback type" In der Grundeinstellung ist das Steppermodul auf den internen Zähler gesetzt. Wenn ein externer Encoder eingesetzt wird, muss die Einstellung mit einem Doppelklick auf den Index 0x8012:08 "Feedback type" im Enum-Menü geändert werden (Abb. "Feedbacksystem auswählen"). |
| Anpassung des Skalierungsfaktors Das Feedbacksystem hängt unmittelbar mit dem Skalierungsfaktor der TwinCAT NC zusammen, so dass der Skalierungsfaktor immer an eine Veränderung des Feedbacksystems angepasst werden muss. |