System konfigurieren
Die Systemkonfiguration ist abhängig vom Zielsystem und ist im Detail in Kapitel Systemkonfiguration beschrieben.
Router-Speicher vergrößern
In TwinCAT Vision ist unter anderem beim Erstellen eines Bildes ein dynamisches Speicherallokieren erforderlich, welches im Router-Speicher erfolgt. Dementsprechend muss der Router-Speicher groß genug konfiguriert werden.
Dies erfolgt im TwinCAT-Projekt unter SYSTEM > Real-Time > Settings > Router Memory (Mbyte).
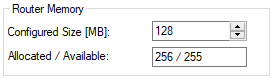
Anschließend muss die Konfiguration aktiviert werden  . Bei einer Verkleinerung des Router-Speichers ist zudem ein Neustart des Zielsystems erforderlich.
. Bei einer Verkleinerung des Router-Speichers ist zudem ein Neustart des Zielsystems erforderlich.
Auswahl eines CPU-Kerns und einer Task
Bei Multicore-Systemen ermöglicht TwinCAT die Unterscheidung zwischen Windows-Kernen und isolierten Kernen. Bei Windows-Kernen teilen sich das Betriebssystem und die TwinCAT-Anwendung die Prozessorzeit. Der Echtzeitanteil kann dabei auf 10% bis 90% begrenzt werden. Im Gegenzug stehen die isolierten Kerne vollständig der TwinCAT-Anwendung zur Verfügung. Aus diesem Grund wird die Verwendung von isolierten Kernen für Vision Anwendungen empfohlen. Zum ersten Austesten können ohne Probleme auch geteilte Kerne verwendet werden.
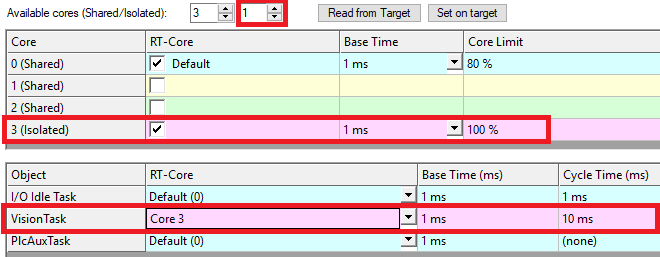
Die Kernkonfiguration erfolgt im TwinCAT Projektbaum unter SYSTEM > Real-Time > Settings. Ein detaillierte Anleitung zu der Konfiguration finden Sie im Kapitel CPU-Kerne und Tasks. Dort ist ebenfalls beschrieben, Sie sie Zykluszeit der ausführenden Task verändern können.
Anschließend muss die Konfiguration aktiviert werden . Bei einer neuen Festlegung von geteilten und isolierten Kernen ist zudem ein Neustart des Zielsystems erforderlich.
Installation eines Treibers für Echtzeit-Ethernet
Um GigE Vision Kameras an TwinCAT Vision anzuschließen, muss auf den benutzen Netzwerkadaptern der TwinCAT RT-Ethernet Treiber installiert sein. Der Treiber sorgt dafür, dass TwinCAT den Netzwerkadapter während der Laufzeit benutzen kann. Details dazu finden Sie im Kapitel Netzwerkadapter.
In der Entwicklungsumgebung kann ein entsprechender Installationsassistent über TWINCAT > Show Realtime Ethernet Compatible Devices... aufgerufen werden. Auf dem Zielsystem kann der Assistent auch über die Datei C:\TwinCAT\3.1\System\TcRteInstall.exe gestartet werden. Im nun geöffneten Dialog kann für die unter Compatible devices gelisteten Netzwerkadapter der RT-Ethernet Treiber installiert werden.
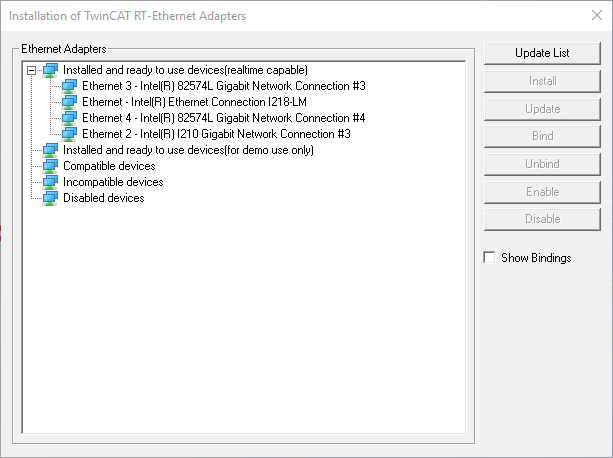
Stellen Sie sicher, dass nun alle Netzwerkadapter, über die Sie eine Kamera verbinden möchten, in der Liste Installed and ready to use devices (realtime capable) stehen.