Beispiel
Dieses Beispiel beinhaltet ein SPS-Programm für TwinCAT 3, das das allgemeine Senden und Empfangen von sACN-Frames zeigt. In jedem Anwendungsfall können die Benutzerdaten des sACN-Frames mit beliebigen SPS-Variablen verbunden werden. Dies ermöglicht eine sehr flexible Nutzung dieses Beispiels. Die Benutzer können ihre eigenen Programme entsprechend ihren Bedürfnissen erstellen. Die einzelnen Funktionsbausteine des Beispiels werden im Abschnitt Programmierung erläutert.
Beispielsweise kann eine Zustandsmaschine für die Realisierung einer Logik verwendet werden, bei der grundsätzlich das „Zuhören“ in der Methode Empfangen verwendet wird, gefolgt von der Methode Senden bei einem speziellen Ereignis oder Timer. Alternativ könnten, wenn die Methode Senden und die Methode Empfangen gleichzeitig ausgeführt werden sollten, zwei Instanzen deklariert werden: eine Instanz zum Senden und die andere zum Empfangen.
Zusätzlich ist ein TwinCAT 2-Beispiel verfügbar, das nur die sACN-Version 2009 unterstützt.
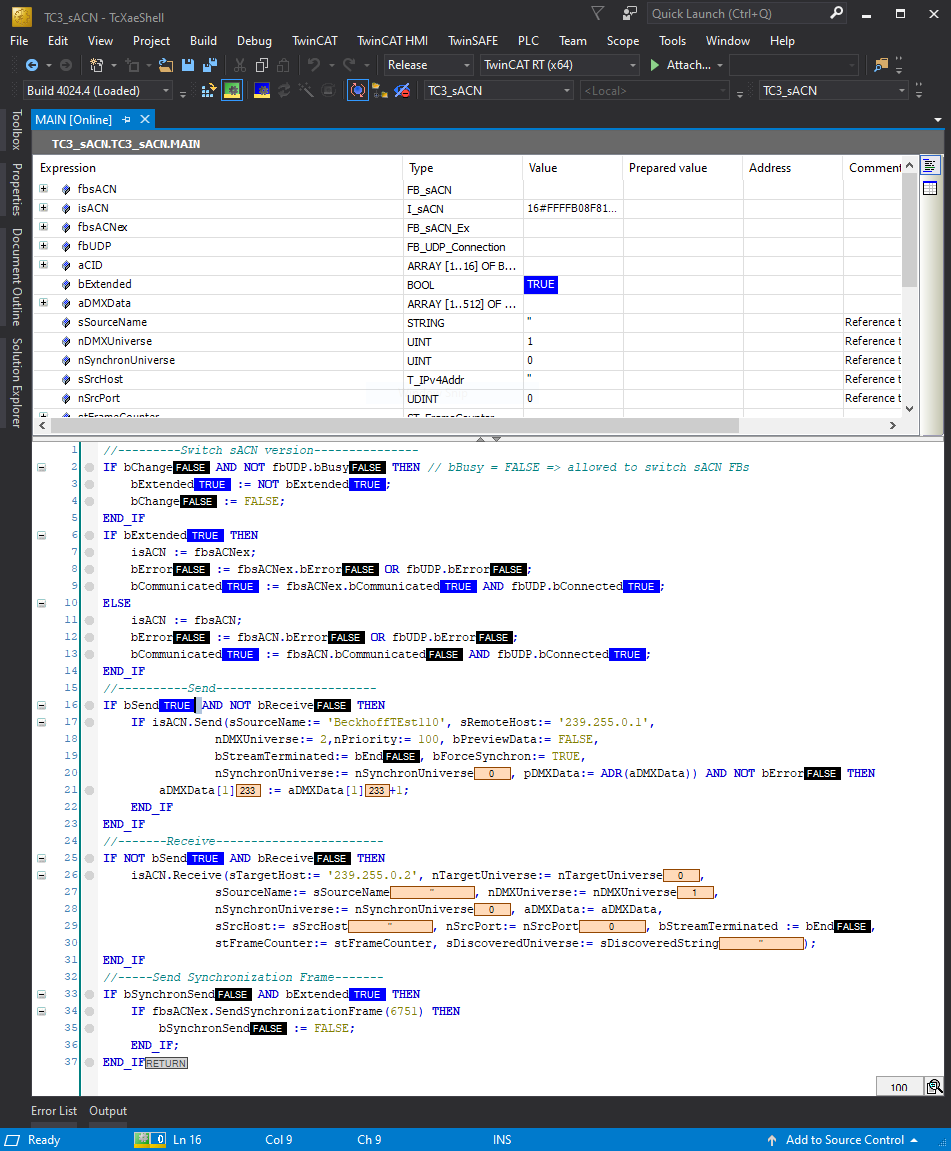
In diesem TwinCAT 3-Beispiel sind beide sACN-Versionen – „sACN 2009“ und „sACN 2016“ – implementiert, damit Benutzer die Version „sACN 2009“ auf der TwinCAT 3-Plattform verwenden können, wenn sie dies möchten. Grundsätzlich geht es bei diesem Beispiel um sACN-Anwendungen, die die Version sACN 2016 verwenden. Es wird jedoch auch darin gezeigt, wie beide sACN-Versionen online umgeschaltet werden können. Durch Instanziieren der Schnittstelle „isACN“ und Auslösen der Variable „bSwitch“ ist es möglich, zwischen diesen beiden sACN-Versionen online umzuschalten.