TwinCAT Library in Simulink®
In Simulink® können (nicht zwingend!) TwinCAT-spezifische Ein- und Ausgangsblöcke verwendet werden, um die mit diesen Blöcken verbundenen Signale/Busse als Inputs bzw. als Outputs im späteren TcCOM in TwinCAT festzulegen. Ein allgemeingültiger Weg ist es ebenfalls, die Standard Input Ports (In) und Output Ports (out) von Simulink® zu verwenden. Dies ist in der Regel auch der best practice Weg, es sei denn, es werden die unten beschriebenen Zusatzfunktionen der TwinCAT-spezifischen Ein- und Ausgangsblöcke benötigt.
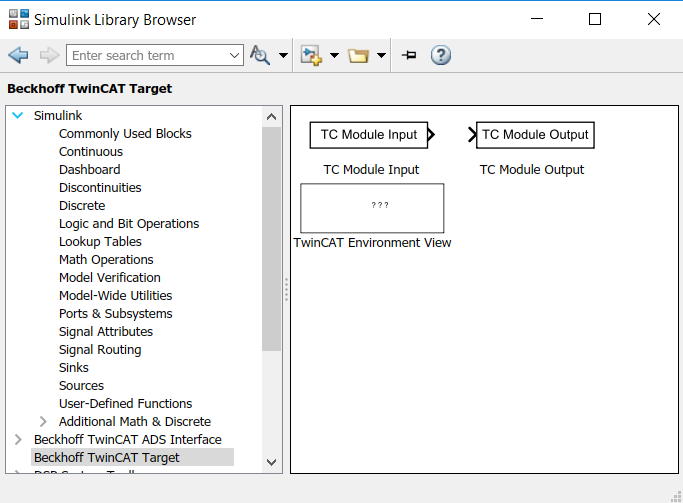
Die TwinCAT-spezifischen Ein- und Ausgangsblöcke befinden sich im
Library Browser > Beckhoff TwinCAT Target.
Wenn Sie die von Beckhoff bereitgestellten Input- und Output-Blöcke verwenden, erhalten Sie folgende zusätzlichen Funktionalitäten gegenüber den Standard Simulink®-Input und -Output Ports:
- Sie können Signale und Busse auch aus Subsystemen direkt als Input oder Output für das TcCOM definieren, ohne die Signale/Busse zuerst aus dem Subsystem in das oberste System zu führen.
- Sie können (nicht zwingend) in den Blockparametern ein automatisches Mapping zu anderen TcCOM oder I/Os hinterlegen, sodass direkt bei der Instanziierung des TcCOM das Mapping automatisiert ausgeführt wird.
- Sie können Initialwerte für Eingänge verwenden. Setzen Sie dazu den Wert Value der Tc Module Inputs auf einen beliebigen Wert.
Bei der Nutzung des automatischen Mappings ist zu beachten, dass Sie bei mehrfacher Instanziierung des TcCOM in TwinCAT einen Mapping-Konflikt erhalten, den Sie durch händisches Mappen wieder auflösen müssen. Entsprechend ist bei Mehrfachinstanziierungen diese Option nicht zu empfehlen.
Neben den TwinCAT-spezifischen Input- und Output-Blöcken wird auch ein TwinCAT Environment View Block bereitgestellt. Dieser kann in der Simulink®-Umgebung genutzt werden, um einfach eine Anzeige über die TwinCAT und TE1400 Versionen auf dem System zu erhalten.
Beispiel
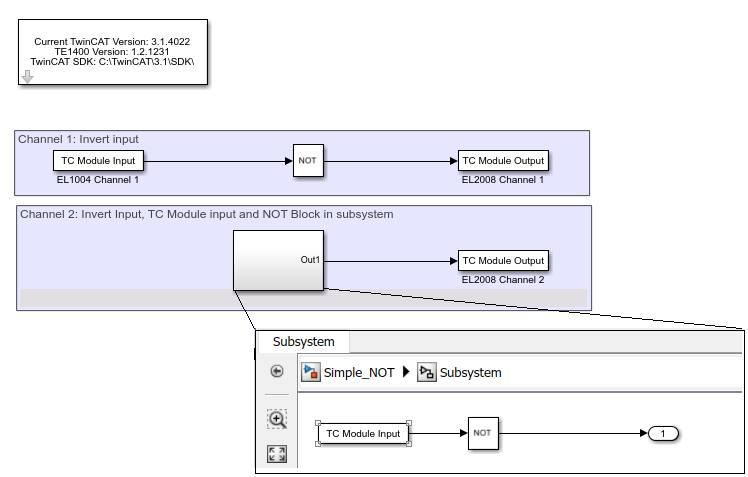
Ein Simulink®-Modell wird erstellt, welches zwei Eingänge negiert wieder ausgibt. Ein Eingang wird dabei in einem Subsystem platziert, siehe Abbildung unten.
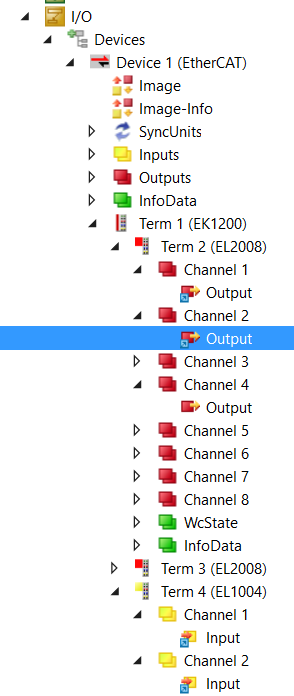
Die Ein- und Ausgänge des Modells werden über die Eigenschaften der TC Module Input und Output automatisch auf digitale Ein- und Ausgänge gemappt. Die dazu notwendigen Tree Items finden Sie in TwinCAT 3, indem Sie den gewünschten Input oder Output anwählen und dann im Tab Variable unter Full Name den String kopieren.
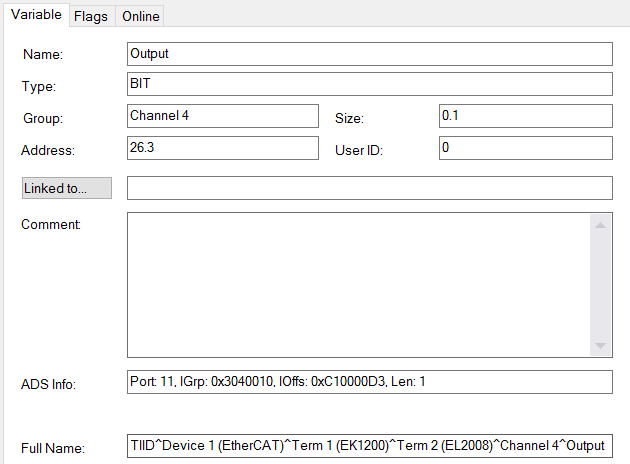
Eine Liste der Kurzformen für den schnellen Zugriff finden Sie in der Dokumentation des Automation Interface > API > ITcSysManager > ITcSysmanager::LookupTreeItem.
Wenn das oben beschriebene Simulink®-Modell übersetzt und in TwinCAT 3 eingebunden wird, wird automatisch ein Mapping zu den entsprechenden Inputs und Outputs hergestellt. Die automatisch generierten Mappings werden zur Unterscheidung zum händischen Mapping mit einem blauen Symbol versehen, während händische Mapping-Symbole weiß erscheinen.