Grundkonzept
Das TwinCAT Scope gliedert sich in zwei Hauptkomponenten: Das Scope View und den Scope Server. Der Scope Server sorgt dabei für die eigentliche Datenaufnahme. Er kann sich per ADS oder per OPC UA mit Steuerungssystemen verbinden und Daten aufzeichnen. Die dafür notwendige Konfiguration wird im Scope View erstellt. Neben der Konfiguration werden dort auch die aufgenommenen Daten in verschiedenen Chart-Typen grafisch dargestellt.
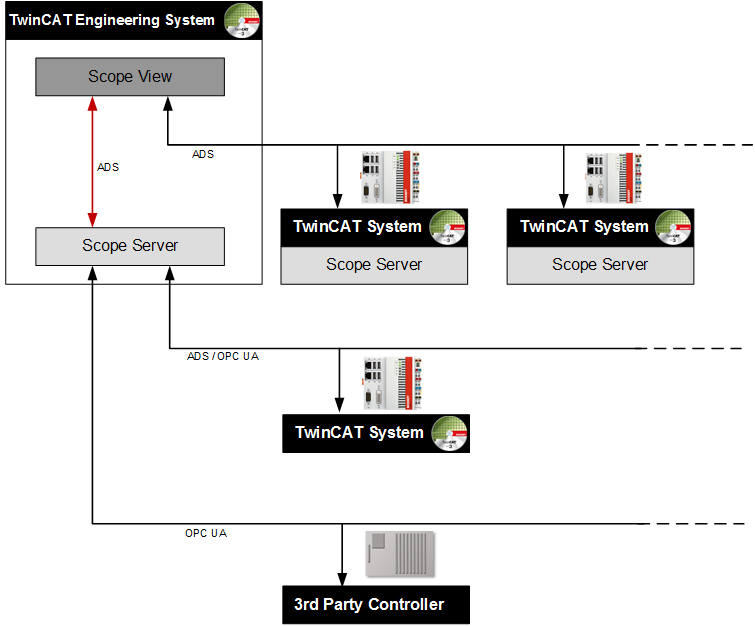
Das Scope View läuft in der Regel auf den Engineering Systemen der Service-Techniker und Inbetriebnehmer oder auf Maschinen-Rechnern, welche aufgezeichnete Daten für das Maschinenpersonal grafisch aufbereiten sollen. Es ist also für die Inbetriebnahme, aber auch für eine kontinuierliche Überwachung von Maschinen und Anlagen gedacht.
Um mit einem Scope View eine Aufnahme auf einem Remote Scope Server zu starten, ist eine ADS Verbindung notwendig. Dabei ist ab Version 3.3.3140.0 auch ein Disconnect möglich. Das bedeutet, dass die Konfiguration auf den Server heruntergeladen wird und dort autark weiterläuft. Alternativ kann der Remote Server von einem SPS Funktionsbaustein gesteuert werden. Ist auf dem Steuerungssystem kein Scope Server installiert, kann auch der Scope Server auf dem Gerät mit dem Scope View, der sogenannte lokale Server, genutzt werden. Dazu muss während der Aufnahme eine konstante Verbindung zu dem Remote Gerät bestehen.
Neben vielen Eigenschaften im Scope View für die grafische Darstellung und Analyse der Datenströme, bietet das Scope auch die Möglichkeit, triggergesteuert, das heißt ereignisbasiert, zu arbeiten. Des Weiteren ist es möglich, die aufgenommenen Daten in verschiedene Dateiformate für die weitergehende Verarbeitung in externen Tools zu exportieren.