IO-Master in TwinCAT anlegen
In TwinCAT werden die Sensoren und Achsen verknüpft und die Bewegungssimulation gesteuert. Die Verknüpfung in TwinCAT funktioniert unabhängig vom benutzten CAD-Tool immer gleich.
Parameter und Sensoren in TwinCAT laden
- Die Runtime im TwinCAT Add-in des CAD-Tools wurde initialisiert.
- Das TwinCAT-Projekt ist geöffnet.
- Das Target im TwinCAT-Projekt wurde als „Inventor-Machine“ eingestellt.
- 1. Markieren Sie unter System das TcCOM Objekt.
- 2. Klicken Sie auf Scan
 .
.
- Alle eingestellten Achsen und Sensoren aus dem CAD-Tool werden in TwinCAT geladen und jeweils als Ein- oder Ausgänge angezeigt. Über die Eingänge werden Informationen aus dem CAD-Tool an das SPS-Projekt übergeben. Über die Ausgänge werden Informationen aus dem SPS-Projekt an das CAD-Projekt übergeben.
- Wenn Sie neue Achsen Ihres CAD-Modells in TwinCAT laden, bleiben alle bestehenden Verknüpfungen erhalten. Es werden dann nur die neuen Achsen und Sensoren hinzugefügt.
Achsen verknüpfen
- Die Runtime im TwinCAT Add-in des CAD-Tools ist initialisiert.
- Achsen und Sensoren sind in TwinCAT geladen.
- 1. Legen Sie zuerst eine neue Motion-Konfiguration an, indem Sie mit der rechten Maustaste auf Motion klicken.
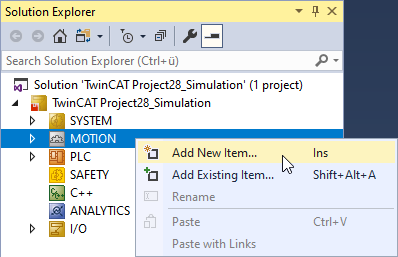
- 2. Wählen Sie Neues Element hinzufügen.
- Das Fenster Motion Konfiguration einfügen öffnet sich.
- 3. Benennen Sie die Konfiguration.
- 4. Bestätigen Sie mit OK.
- 5. Legen Sie eine Achse an, indem Sie mit rechts Achsen anklicken.
- 6. Wählen Sie Neues Element hinzufügen.
- Das Fenster Einfügen einer NC-Achse öffnet sich.
- 7. Benennen Sie die Achse und bestätigen Sie mit OK.
- 8. Klicken Sie mit der rechten Maustaste auf die Achse des TcCom-Objekts.
- 9. Wählen Sie Verknüpfung ändern….
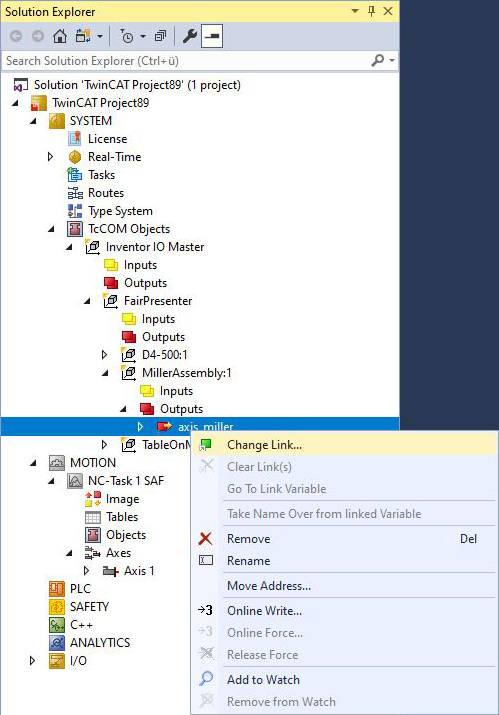
- Das Fenster Variablenverknüpfung öffnet sich.
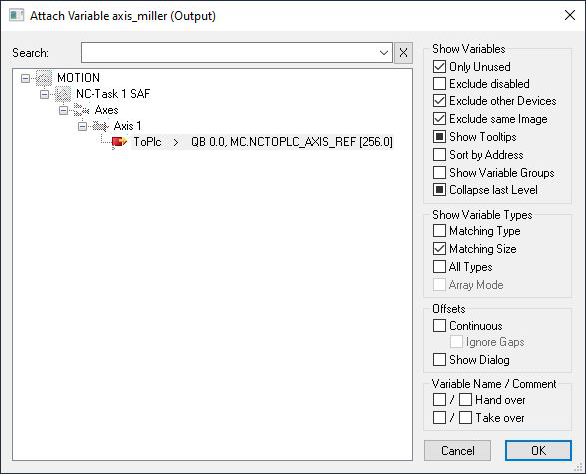
- 10. Wählen Sie die Achse im Motion-Bereich aus, mit der Sie die Achse aus dem CAD verknüpfen möchten.
- 11. Falls die gewünschte Achse bereits mit einem Projekt verknüpft ist, entfernen Sie den Haken aus dem Kontrollkästchen Nur unbenutzte, um alle angelegten Achsen zu sehen.
- 12. Bestätigen Sie mit OK.
- 13. Um den Kontext einzustellen, klicken Sie doppelt auf den obersten Knoten des TcCom Objekts.
- 14. Wählen Sie die Registerkarte Context.
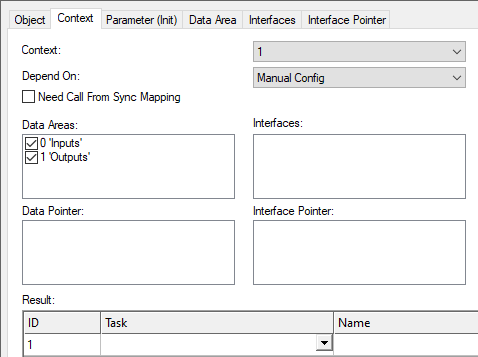
- 15. Ordnen Sie mit Hilfe des Drop-down-Menüs Task dem Objekt eine Task zu.
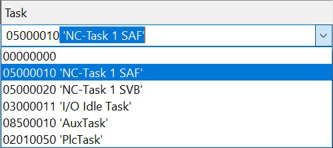
Wenn Sie NC-Achsen nutzen, wird die Auswahl von „NC-Task 1 SAF“ empfohlen. - 16. Aktivieren Sie die Konfiguration.
- Sie können die Simulation jetzt durchführen.
Umrechnung der Achspositionen zwischen TwinCAT-Projekt und CAD-Projekt
Sie haben die Möglichkeit im IO-Master von TwinCAT Einstellungen bezüglich der Achsen und Sensoren vorzunehmen. Unter Unit haben Sie die Möglichkeit für beispielsweise eine Achse die gewünschte Einheit einzustellen. Der in den IO-Master geschriebene Zahlenwert wird entsprechend der eingestellten Einheit umgerechnet und in das CAD-Tool übertragen. Zudem werden auch der eingestellte Offset sowie die Grenzen der Bereichsüberwachung aus Inventor®- entsprechend der eingestellten Einheit interpretiert.
- 1. Öffnen Sie den gewünschten Oberknoten eines Objekts.
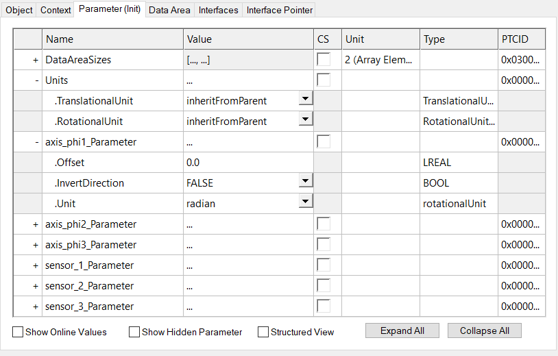
- 2. Wählen Sie die Registerkarte Parameter.
- 3. Stellen Sie unter Value die Einheiten für Offset Ihren Anforderungen entsprechend ein.
- Daraus ergibt sich eine Umrechnung abhängig von der gewählten Einheit.
Einheiten
In Inventor können die Einheiten entsprechend der Modellhierarchie nach dem Scannen der Konfiguration im TwinCAT-Projekt eingestellt werden. Es können separat für jede Baugruppe je eine Einheit für translatorische Achsen und eine Einheit für rotatorische Achsen eingestellt werden. Außerdem kann für jede Achse entsprechend ihres Typs (translatorisch/rotatorisch) eine Einheit eingestellt werden.
Standardmäßig sind in der Hauptbaugruppe die Einheiten „millimeter“ und „degree“ eingestellt. Für alle Unterbaugruppen und alle Achsen und Abstandssensoren ist standardmäßig „inheritFromParent“ eingestellt. Das heißt alle Achsen und Abstandssensoren übernehmen in diesem Fall die Einheiten der übergeordneten Baugruppe. Werden ausgehend von dieser Standardeinstellung auf Ebene einer Unterbaugruppe die Einheiten verändert, dann gelten die Einheiten dieser Unterbaugruppe für alle untergeordneten Unterbaugruppen, Achsen und Abstandssensoren. Mit der Auswahl „inheritFromMainAssembly“ können untergeordnete Baugruppen, Achsen oder Abstandssensoren die Einheiten der Hauptbaugruppe übernehmen. Des Weiteren ist es möglich für jede Achse oder jeden Abstandssensor individuell eine Einheit einzustellen.
Die eigenen Einheiten von Inventor® spielen hierbei keine Rolle. Im CAD-Modell können verschiedene Einheiten eingestellt sein.
Offset und „InvertDirection“
Der Gelenkursprung im CAD-Tool und der von der SPS angenommene Achsursprung sind möglicherweise nicht identisch. Wir empfehlen sowohl den Offset als auch die Richtung in dem TwinCAT-Projekt nach dem Laden oder Scannen der Achsen und Sensoren einzustellen.
- 1. Passen Sie zuerst die Richtung an.
- Zeigen SPS- und CAD-Koordinatensystem in dieselbe Richtung, dann wird „InvertDirection“ auf „FALSE“ gesetzt, andernfalls wird „InvertDirection“ auf „TRUE“ gesetzt.
- 2. Stellen Sie den Offset zwischen den beiden Koordinatensystemen in der jeweiligen Achs- bzw. Abstandssensoreinheit ein.
- Der Gelenkursprung wird jetzt passend umgerechnet.
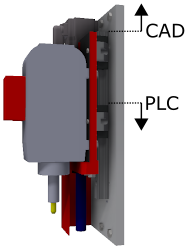
Beispiel
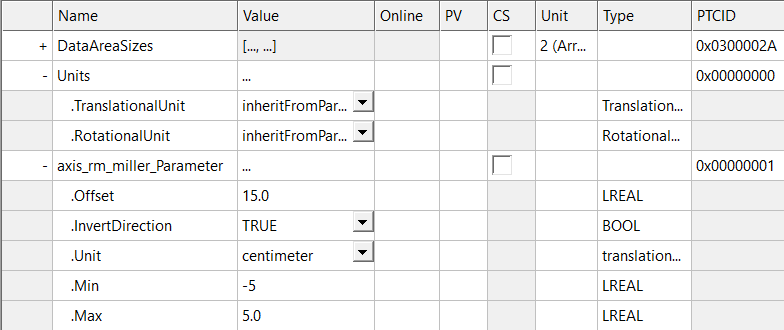
In diesem Beispiel wird die vertikale Bewegungsachse eines Fräsers parametriert.
Das CAD-Koordinatensystem zeigt in die entgegengesetzte Richtung und hat einen Offset gegenüber dem SPS-Koordinatensystem. Der Offset beträgt 150 mm. Nach dem oben erklärten Schema wurde die Einheit „cm“ für die Achse festgelegt. Für dieses Beispiel müssen Sie also „InvertDirection“ auf „TRUE“ setzen und den „Offset“ auf „15“.
Die Bereichsüberwachung der Achse wird im SPS-Koordinatensystem und in den Achs-Einheiten definiert. In diesem Beispiel soll die Bereichsüberwachung auslösen, wenn die Achse den definierten Bereich von 5 oder - 5 überschreitet. Für „Min“ parametrieren Sie daher „-5“ und für „Max“ „5“.
Die Umrechnung zwischen Achsposition in SPS-Koordinaten xAxis,SPS und CAD-Koordinaten xAxis,CAD wird im Folgenden beschrieben:
- Faktor für die Richtungsumkehr:

Ist „InvertDirection“ gleich „TRUE“, dann ist sdir = -1 andernfalls gilt sdir = 1. - Offset in der spezifizierten Einheit:

- Der Umrechnungsfaktor sunit der gewählten Einheit (translatorisch: Mikrometer, Millimeter, Centimeter, Meter, Inch, Foot oder rotatorisch: Grad, Radiant)
- Untere Grenze der Bereichsüberwachung in der spezifizierten Einheit xmin.
- Obere Grenze der Bereichsüberwachung in der spezifizierten Einheit xmax.
- Umrechnung von Achsen aus der SPS in das CAD-Tool:

- Bedingung für die Bereichsüberwachung von Achsen (nur für Inventor):


- Umrechnung von Kollisionssensoren, aus dem CAD-Tool in die SPS:

- Bedingungen für die Bereichsüberwachung für die Kollisionssensoren, aus dem CAD-Tool in die SPS:

