Verkabelung
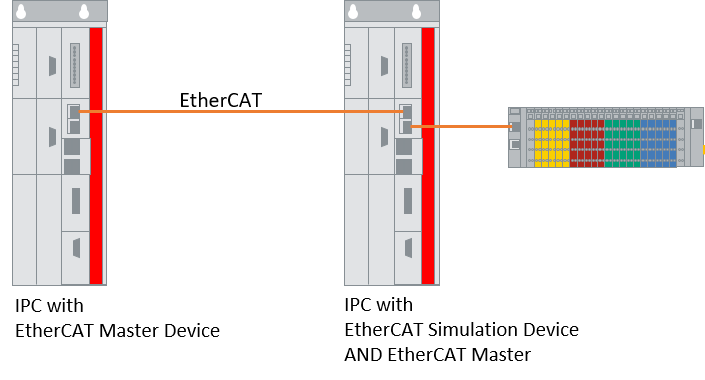
Wie bereits im Kapitel Übersicht beschrieben, wurde die EtherCAT-Simulation entworfen um, eine virtuelle Inbetriebnahme einer Anlage zu unterstützen. Die für diesen Zweck normale Verkabelung wird wie folgt aussehen:

Auf der linken Seite ist der Steuerungsrechner zu sehen, welcher das Original-Steuerungsprojekt enthält, welches später verwendet werden soll um die Maschine/ Anlage zu steuern. Auf der rechten Seite zu sehen ist ein Simulations-IPC, welcher ein EtherCAT-Simulation Device enthält. Beide Systeme sind durch ein Standard-EtherCAT-Kabel verbunden.
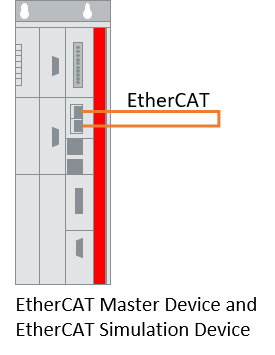
Verwendung von EtherCAT und EtherCAT-Simulation auf demselben IPC:
Zum Testen von Teilfunktionen des Steuerungsprogramms (z.B. EtherCAT-Diagnose) zu einem früheren Zeitpunkt (vor der virtuellen Inbetriebnahme), kann auch der Steuerungsrechner zur Simulation des EtherCATs mit verwendet werden, solange der Steuerungsrechner über genügend freie Netzwerkschnittstellen verfügt. Genau wie jeder EtherCAT-Master benötigt auch jedes EtherCAT-Simulation-Device eine eigene Netzwerkschnittstelle.
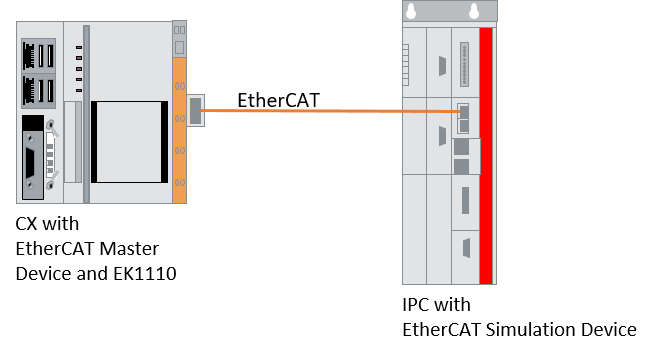
Verwendung eines CX als Steuerung
Wird als Steuerung ein CX verwendet, der mit einem Simulations-IPC gekoppelt werden soll, sind je nach Verkabelung u.U. noch EtherCAT-Teilnehmer vorhanden, die nicht berücksichtigt werden dürfen. Im folgenden Bild sind dies z.B. das intelligente Netzteil des CXes und eine EK1110 EtherCAT Extension. Hier kann im Reiter Settings eine manuelle Geräte Korrektur eingestellt werden, also Geräte die nicht berücksichtigt werden sollen. Wird diese Einstellung nicht gesetzt, könnte dies zur Folge haben, dass der EtherCAT-Master nicht auf startet oder Working-Counter falsch berechnet werden.
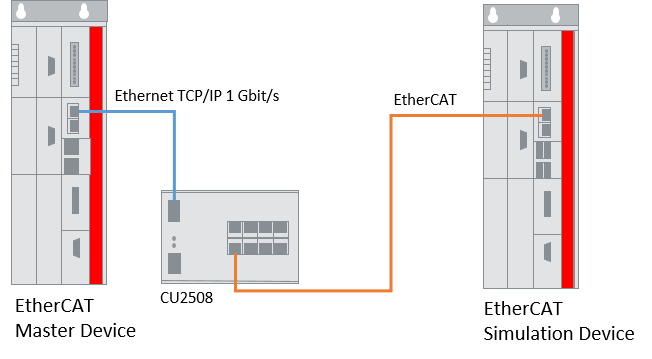
Verwendung des Port-Multipliers auf der Original-Projekt-Seite:
Wird in der Echtzeitkonfiguration des Steuerungsrechners ein CU2508 Port-Multiplier verwendet, können die Ausgänge des Port-Multipliers mit normalen Netzwerkports auf einem Simulation-Rechner verbunden werden. Für diese Netzwerkports müssen dann auf dem Simulation-Rechner entsprechend viele EtherCAT-Simulation Devices erstellt werden.
Hinweis | |
Verwendung des Port-Multipliers auf der EtherCAT-Simulation-Seite nicht unterstützt Die Verwendung eines CU2508 Port-Multipliers auf der EtherCAT-Simulation-Seite wird nicht unterstützt. Wird ein CU2508 auf der Slave-Seite eingesetzt, so ist dieser im TwinCAT-Projekt, welches die Konfigurationsdatei exportiert, nicht enthalten. Auch den EtherCAT-Frame erhält dieser CU2508 erst nach dem EtherCAT-Simulation-Device. Somit ist dieser für das EtherCAT-Simulation-Device „unsichtbar“. Daraus folgt, dass der Device-State und auch der Slave-Count auf der EtherCAT-Master-Seite keine korrekten Werte anzeigen. Eine im Original-Projekt ausprogrammierte EtherCAT-Diagnose würde somit falsche Ergebnisse anzeigen. |
Verwendung des Port-Multipliers auf der EtherCAT-Simulation-Seite:
Die Verwendung eines CU2508 Port-Multipliers auf der EtherCAT-Simulation-Seite wird nicht unterstützt. Wird ein CU2508 auf der Slave-Seite eingesetzt, so ist dieser im TwinCAT-Projekt, welches die Konfigurationsdatei exportiert, nicht enthalten. Auch den EtherCAT-Frame erhält dieser CU2508 erst nach dem EtherCAT-Simulation-Device. Somit ist dieser für das EtherCAT-Simulation-Device „unsichtbar“. Daraus folgt, dass der Device-State und auch der Slave-Count auf der EtherCAT-Master-Seite keine korrekten Werte anzeigen. Eine im Original-Projekt ausprogrammierte EtherCAT-Diagnose würde somit falsche Ergebnisse anzeigen.
Betreiben der EtherCAT Simulation im Mixed-Mode
Soll eine Maschine/ Anlage schrittweise in Betrieb genommen werden bzw. nur Teile der Maschine/ Anlage simuliert werden, kann eine Verkabelung wie in der folgenden Abbildung dargestellt erfolgen. Hierzu ist es erforderlich, dass der Simulations-IPC 2 freie Netzwerk-Schnittstellen besitzt. Die erste Netzwerkschnittstelle wird als EtherCAT-Simulation-Device verwendet und wird mit dem EtherCAT-Kabel zum Steuerungs-IPC verbunden. Die zweite Netzwerkschnittstelle wird als EtherCAT-Master verwendet und mit den real existierenden Busteilnehmern verbunden (siehe hierzu auch Mischbetrieb von realen und virtuellen Slaves).