Einführung EL72x1
Servo-Motorklemmen, 48 VDC
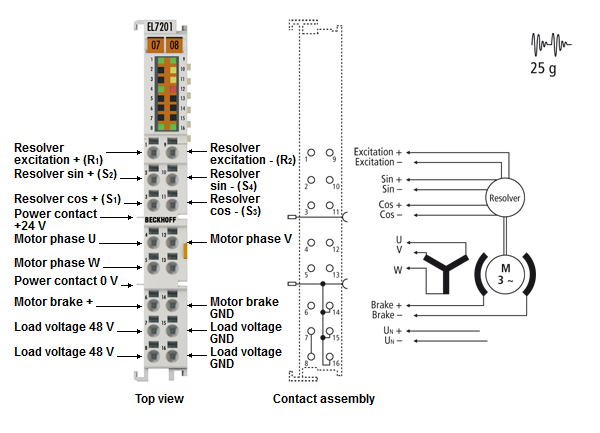
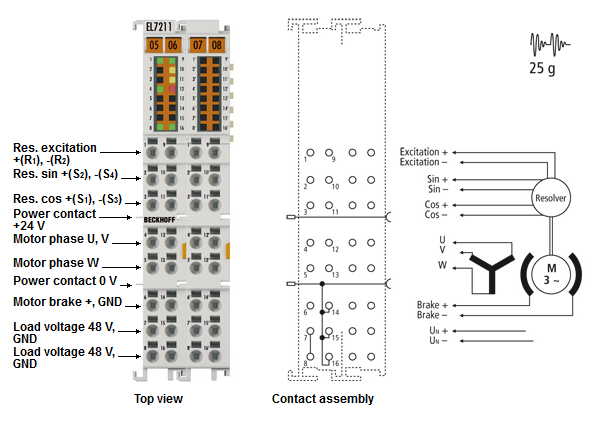
Die Servomotor-EtherCAT-Klemmen EL7201 (MDP742-Profil, 48 VDC, 2,8 Arms) / EL7201-0001 (DS402-Profil, 48 VDC, 2,8 Arms) und EL7211 (MDP742-Profil, 48 VDC, 4,5 Arms) / EL7211-0001 (DS402-Profil, 48 VDC, 4,5 Arms) mit integriertem Resolverinterface, bieten hohe Servo-Performance in sehr kompakter Bauform. Die EL72x1 wurde für die Motortypen der Reihe AM31xx und AM81xx von Beckhoff Automation konzipiert.
Die schnelle Regelungstechnik, auf Basis einer feldorientierten Strom- und PI-Drehzahlregelung, unterstützt schnelle und hochdynamische Positionieraufgaben. Zahlreiche Überwachungen, wie der Über- und Unterspannung, des Überstroms, der Klemmentemperatur oder der Motorauslastung, über die Berechnung eines I²T-Modells, bieten ein Höchstmaß an Betriebssicherheit.
EtherCAT, als leistungsfähige Systemkommunikation, und CAN-over-EtherCAT (CoE), als Applikationsschicht, ermöglichen die ideale Anbindung an die PC-basierte Steuerungstechnik.
Neueste Leistungshalbleiter garantieren minimale Verlustleistung und ermöglichen beim Bremsbetrieb eine Rückspeisung in den Zwischenkreis.
Die LEDs zeigen Status-, Warn und Fehlermeldungen sowie eventuell aktive Limitierungen an.
 | Empfohlene TwinCAT-Version Um die volle Performance der EL72x1 in Anspruch nehmen zu können wird empfohlen, die EL72x1 mit mindestens TwinCAT 2.11 R3 zu betreiben! |
| Obligatorische Hardware Die EL72x1 muss mit einem echtzeitfähigen Rechner und Distributed Clocks betrieben werden! |
| Freigegebene Motoren Ein einwandfreier Betrieb kann nur mit den von Beckhoff freigegebenen Motoren gewährleistet werden. |
Schnellverweise
Hinweise zum Anschluss
- Kapitel "Montage und Verdrahtung",
Hinweise zur Konfiguration
- Kapitel "Inbetriebnahme",
- Kapitel "Konfiguration mit dem TwinCAT System Manager",