Sensorloser Betrieb
Da der Standard Betrieb eines Schrittmotors mit einem konstanten, lastunabhängigen Strom nicht energieeffizient ist und zu einer dauerhaft hohen, thermischen Belastung führt, wird nach Wegen gesucht diese Belastung zu reduzieren.
Funktion
Durch die Auswertung der drehzahlproportionalen, induzierten Gegenspannung ist es möglich den Statorstrom mit Hilfe eines Maschinenmodells lastabhängig (ohne Sensor / Encoder) zu regeln und damit den Wirkungsgrad signifikant zu erhöhen.
Da für die Betriebsart eine Minimalamplitude des Betrages der induzierten Gegenspannung erforderlich ist, funktioniert die sensorlose Regelung nur im mittleren und oberen Drehzahlbereich. Im unteren Drehzahlbereich wird der Motor im Standard Betrieb betrieben. Die Umschaltung zum sensorlosen Betrieb erfolgt über parametrierbare, motorabhängige Umschaltdrehzahl. Die Umschaltdrehzahl liegt meist im Bereich von einer halben bis drei Umdrehungen pro Sekunde (Crossover velocity 1).
Beim Einschalten der Sensorlosen Regelung entsteht durch den Einschwingvorgang der Regelung ein leichter mechanischer Ruck der Welle, der sich proportional zu der an der Welle wirksamen Last verhält.
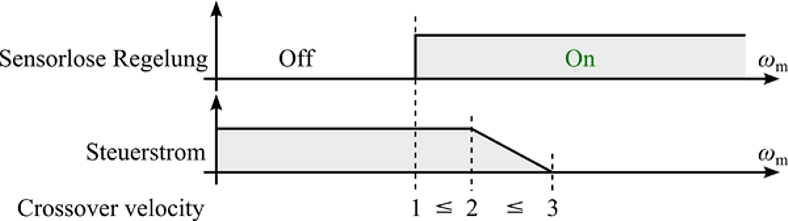
Nach dem Einschalten bleibt der Steuerstrom bis zu einer zweiten parametrierbaren Drehzahl konstant und wird bis zu einer dritten parametrierbaren Drehzahl über eine lineare Rampe reduziert.
Eine lange Steuerstromrampe führt zu einer stärkeren Stabilisierung des Einschwingvorgangs der Regelung. Sie führt aber auch zu einem länger fließenden konstanten Motorstrom und dadurch bedingt zu etwas höheren Verlusten.
Motorabhängigkeit
Wegen der starken Abhängigkeit der Regelung von den Motorparametern, den Reglerparametern und dem Motorverhalten selbst, ist die Verwendung des Sensorlosen Betriebs auf Beckhoff Motoren beschränkt. Die Betriebsart wird für Motoren anderer Hersteller nicht unterstützt.
Parametrierung
Im Vergleich zu den anderen Betriebsarten ist ein relativ hoher Parametrierungsaufwand erforderlich. Alle notwendigen Parameter sind jedoch für die endsprechenden Motortypen über eine Startup-Liste vorparametriert. Bei der Inbetriebnahme ist lediglich eine Anpassung der Drehzahlreglerparameter erforderlich, die durch die gegebenen Massenträgheitsverhältnisse der angeschlossenen Lasten im mechanischen System bedingt ist.
Für den Drehzahlregler gilt prinzipiell die gleiche Abhängigkeit von Massenträgheitsmoment und Drehmomentkonstante wie in den Extended Operation Modes. Durch die unterlagerte Sensorlose Regelung ist es jedoch möglich, dass durch eine abweichende Parametrierung ein besseres Gesamtergebnis erreicht werden kann.
Alle Parameter, die für den Sensorlosen Betrieb erforderlich sind, können zusammengefasst der Tabelle „Übersicht der Parametereinstellungen einzelner Betriebsarten“ entnommen werden.
Zusammenfassung
In dieser Betriebsart wird der Motorstrom ohne Encoder oberhalb einer Mindestdrehzahl lastabhängig geregelt. Damit lässt sich ein besonders kostengünstiger Antrieb in Verbindung mit einem hohen Wirkungsgrad realisieren. Die erreichbare Dynamik der Antriebsregelung ist im Vergleich zu den anderen Betriebsarten leicht reduziert.
Vorteile gegenüber dem Standard Betrieb
- geringe Stromaufnahme (nahezu vollständige Lastabhängigkeit)
- hoher Wirkungsgrad
- kein Encoder erforderlich
Voraussetzungen
- relativ hoher Parametrierungsaufwand erforderlich (Drehzahlregler + Zusatzparameter)
- Minimaldrehzahl erforderlich (Bei zu geringer Drehzahl wird automatisch in Standard betrieb gewechselt)
- Dynamik etwas niedriger als im Standard Betrieb
- Nur mit Schrittmotoren der Firma Beckhoff Automation möglich (AS10xx)