Allgemeine Inbetriebnahmehinweise des EtherCAT Slaves
In dieser Übersicht werden in Kurzform einige Aspekte des EtherCAT Slave Betriebs unter TwinCAT behandelt. Ausführliche Informationen dazu sind entsprechenden Fachkapiteln z.B. in der EtherCAT-Systemdokumentation zu entnehmen.
Diagnose in Echtzeit: WorkingCounter, EtherCAT State und Status
Im Allgemeinen bietet ein EtherCAT Slave mehrere Diagnoseinformationen zur Verarbeitung in der ansteuernden Task an.
Diese Diagnoseinformationen erfassen unterschiedliche Kommunikationsebenen und damit Quellorte und werden deshalb auch unterschiedlich aktualisiert.
Eine Applikation, die auf die Korrektheit und Aktualität von IO-Daten aus einem Feldbus angewiesen ist, muss die entsprechend ihr unterlagerten Ebenen diagnostisch erfassen.
EtherCAT und der TwinCAT System Manager bieten entsprechend umfassende Diagnoseelemente an. Die Diagnoseelemente, die im laufenden Betrieb (nicht zur Inbetriebnahme) für eine zyklusaktuelle Diagnose aus der steuernden Task hilfreich sind, werden im Folgenden erläutert.
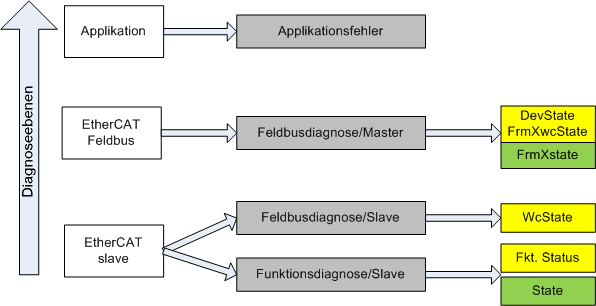
Im Allgemeinen verfügt ein EtherCAT Slave über
- slave-typische Kommunikationsdiagnose (Diagnose der erfolgreichen Teilnahme am Prozessdatenaustausch und richtige Betriebsart)
Diese Diagnose ist für alle Slaves gleich.
als auch über - kanal-typische Funktionsdiagnose (geräteabhängig)
Siehe entsprechende Gerätedokumentation
Die Farbgebung in Abb. Auswahl an Diagnoseinformationen eines EtherCAT Slave entspricht auch den Variablenfarben im System Manager, siehe Abb. Grundlegende EtherCAT Slave Diagnose in der PLC.
Farbe | Bedeutung |
|---|---|
gelb | Eingangsvariablen vom Slave zum EtherCAT Master, die in jedem Zyklus aktualisiert werden |
rot | Ausgangsvariablen vom Slave zum EtherCAT Master, die in jedem Zyklus aktualisiert werden |
grün | Informationsvariabeln des EtherCAT Masters, die azyklisch aktualisiert werden d. h. in einem Zyklus eventuell nicht den letztmöglichen Stand abbilden. Deshalb ist ein Auslesen solcher Variablen über ADS sinnvoll. |
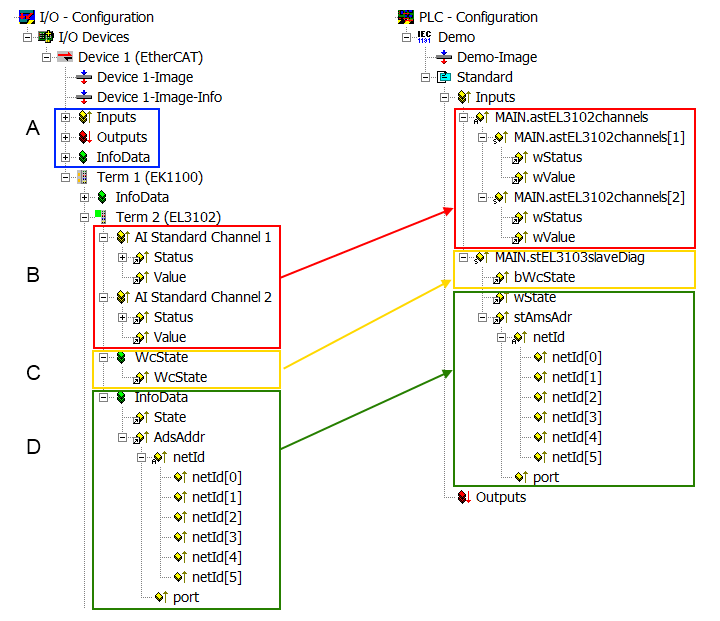
In Abb. Grundlegende EtherCAT Slave Diagnose in der PLC ist eine Beispielimplementation einer grundlegenden EtherCAT Slave Diagnose zu sehen. Dabei wird eine Beckhoff EL3102 (2 kanalige analoge Eingangsklemme) verwendet, da sie sowohl über slave-typische Kommunikationsdiagnose als auch über kanal-spezifische Funktionsdiagnose verfügt. In der PLC sind Strukturen als Eingangsvariablen angelegt, die jeweils dem Prozessabbild entsprechen.
Dabei werden folgende Aspekte abgedeckt:
|
Kennzeichen |
Funktion |
Ausprägung |
Anwendung/Auswertung |
|---|---|---|---|
|
A |
Diagnoseinformationen des EtherCAT Master zyklisch aktualisiert (gelb) oder azyklisch bereitgestellt (grün). |
|
Zumindest der DevState ist in der PLC zyklusaktuell auszuwerten. Die Diagnoseinformationen des EtherCAT Master bieten noch weitaus mehr Möglichkeiten, die in der EtherCAT-Systemdokumentation behandelt werden. Einige Stichworte:
|
|
B |
Im gewählten Beispiel (EL3102) umfasst die EL3102 zwei analoge Eingangskanäle, die einen eigenen Funktionsstatus zyklusaktuell übermitteln. |
Status
|
Damit sich die übergeordnete PLC-Task (oder entsprechende Steueranwendungen) auf korrekte Daten verlassen kann, muss dort der Funktionsstatus ausgewertet werden. Deshalb werden solche Informationen zyklusaktuell mit den Prozessdaten bereitgestellt. |
|
C |
Für jeden EtherCAT Slave mit zyklischen Prozessdaten zeigt der Master durch einen so genannten WorkingCounter an, ob der Slave erfolgreich und störungsfrei am zyklischen Prozessdatenverkehr teilnimmt. Diese elementar wichtige Information wird deshalb im System Manager zyklusaktuell
zur Verlinkung bereitgestellt. |
WcState (Working Counter) 0: gültige Echtzeitkommunikation im letzten Zyklus 1: ungültige Echtzeitkommunikation ggf. Auswirkung auf die Prozessdaten anderer Slaves, die in der gleichen SyncUnit liegen |
Damit sich die übergeordnete PLC-Task (oder entsprechende Steueranwendungen) auf korrekte Daten verlassen kann, muss dort der Kommunikationsstatus des EtherCAT Slaves ausgewertet werden. Deshalb werden solche Informationen zyklusaktuell mit den Prozessdaten bereitgestellt. |
|
D |
Diagnoseinformationen des EtherCAT Masters, die zwar am Slave zur Verlinkung dargestellt werden, aber tatsächlich vom Master für den jeweiligen Slave ermittelt und dort dargestellt werden. Diese Informationen haben keinen Echtzeit-Charakter weil sie
|
State aktueller Status (INIT..OP) des Slaves. Im normalen Betriebszustand muss der Slave im OP (=8) sein. AdsAddr Die ADS-Adresse ist nützlich, um aus der PLC/Task über ADS mit dem EtherCAT Slave zu kommunizieren, z.B. zum Lesen/Schreiben auf das CoE. Die AMS-NetID eines Slaves entspricht der AMS-NetID des EtherCAT Masters, über den port (= EtherCAT Adresse) ist der einzelne Slave ansprechbar. |
Informationsvariabeln des EtherCAT Masters, die azyklisch aktualisiert werden, d.h. in einem Zyklus eventuell nicht den letztmöglichen Stand abbilden. Deshalb ist ein Auslesen solcher Variablen über ADS möglich. |
Hinweis | |
Diagnoseinformationen Es wird dringend empfohlen, die angebotenen Diagnoseinformationen auszuwerten um in der Applikation entsprechend reagieren zu können. |
CoE-Parameterverzeichnis
Das CoE-Parameterverzeichnis (CanOpen-over-EtherCAT) dient der Verwaltung von Einstellwerten des jeweiligen Slaves. Bei der Inbetriebnahme eines komplexeren EtherCAT Slaves sind unter Umständen hier Veränderungen vorzunehmen. Zugänglich ist es über den TwinCAT System Manager, s. Abb. EL3102, CoE-Verzeichnis:
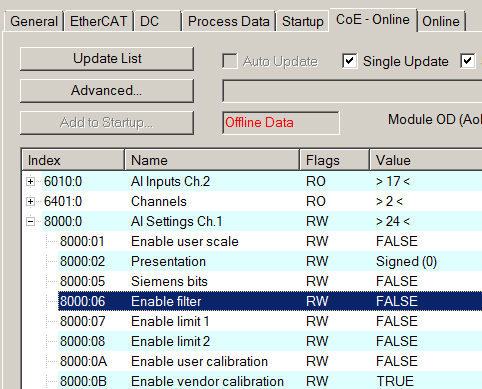
 | EtherCAT-Systemdokumentation Es ist die ausführliche Beschreibung in der EtherCAT-Systemdokumentation (EtherCAT Grundlagen --> CoE Interface) zu beachten! |
Einige Hinweise daraus in Kürze:
- Es ist geräteabhängig, ob Veränderungen im Online-Verzeichnis slave-lokal gespeichert werden. EL-Klemmen (außer den EL66xx) verfügen über diese Speichermöglichkeit.
- Es ist vom Anwender die StartUp-Liste mit den Änderungen zu pflegen.
Inbetriebnahmehilfe im TwinCAT System Manager
In einem fortschreitenden Prozess werden für EL/EP-EtherCAT-Geräte Inbetriebnahmeoberflächen eingeführt. Diese sind in TwinCAT System Managern ab TwinCAT 2.11R2 verfügbar. Sie werden über entsprechend erweiterte ESI-Konfigurationsdateien in den System Manager integriert.
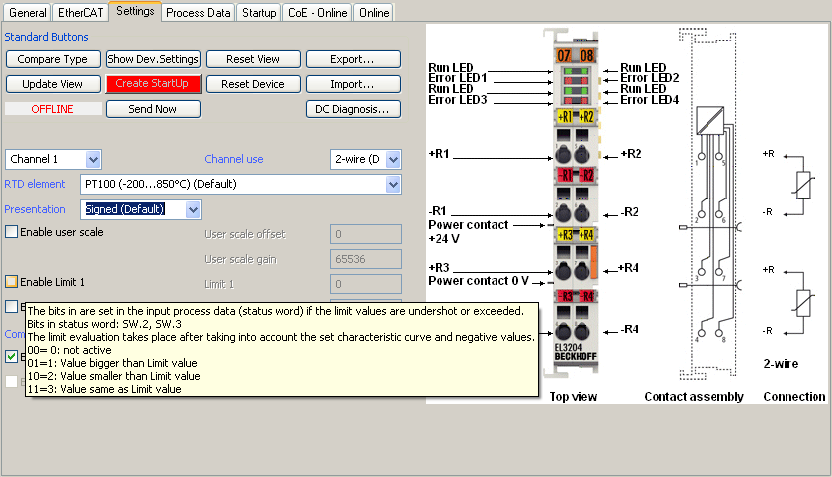
Diese Inbetriebnahme verwaltet zugleich
- CoE-Parameterverzeichnis
- DC/FreeRun-Modus
- die verfügbaren Prozessdatensätze (PDO)
Die dafür bisher nötigen Karteireiter „Process Data“, „DC“, „Startup“ und „CoE-Online“ werden zwar noch angezeigt, es wird aber empfohlen die automatisch generierten Einstellungen durch die Inbetriebnahmehilfe nicht zu verändern, wenn diese verwendet wird.
Das Inbetriebnahme-Tool deckt nicht alle möglichen Einsatzfälle eines EL/EP-Gerätes ab. Sind die Einstellmöglichkeiten nicht ausreichend, können vom Anwender wie bisher DC-, PDO- und CoE-Einstellungen manuell vorgenommen werden.
EtherCAT State: automatisches Default-Verhalten des TwinCAT System Managers und manuelle Ansteuerung
Ein EtherCAT Slave hat für den ordnungsgemäßen Betrieb nach der Versorgung mit Betriebsspannung die Stati
- INIT
- PREOP
- SAFEOP
- OP
zu durchlaufen. Der EtherCAT Master ordnet diese Zustände an in Abhängigkeit der Initialisierungsroutinen, die zur Inbetriebnahme des Gerätes durch die ES/XML und Anwendereinstellungen (Distributed Clocks (DC), PDO, CoE) definiert sind. Siehe dazu auch Kapitel "Grundlagen der Kommunikation, EtherCAT State Machine. Der Hochlauf kann je nach Konfigurationsaufwand und Gesamtkonfiguration bis zu einigen Sekunden dauern.
Auch der EtherCAT Master selbst muss beim Start diese Routinen durchlaufen, bis er in jedem Fall den Zielzustand OP erreicht.
Der vom Anwender beabsichtigte, von TwinCAT beim Start automatisch herbeigeführte Ziel-State kann im System Manager eingestellt werden. Sobald TwinCAT in RUN versetzt wird, wird dann der TwinCAT EtherCAT Master die Zielzustände anfahren.
Standardeinstellung
Standardmäßig ist in den erweiterten Einstellungen des EtherCAT Masters gesetzt:
- EtherCAT Master: OP
- Slaves: OP
Diese Einstellung gilt für alle Slaves zugleich.
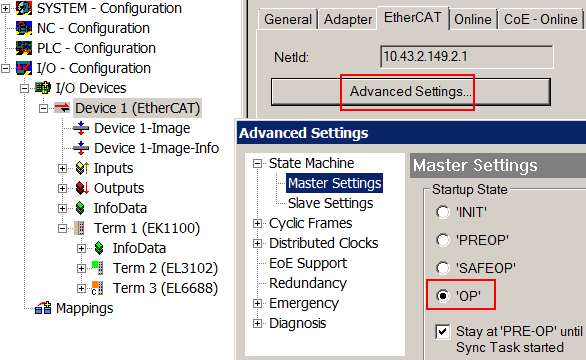
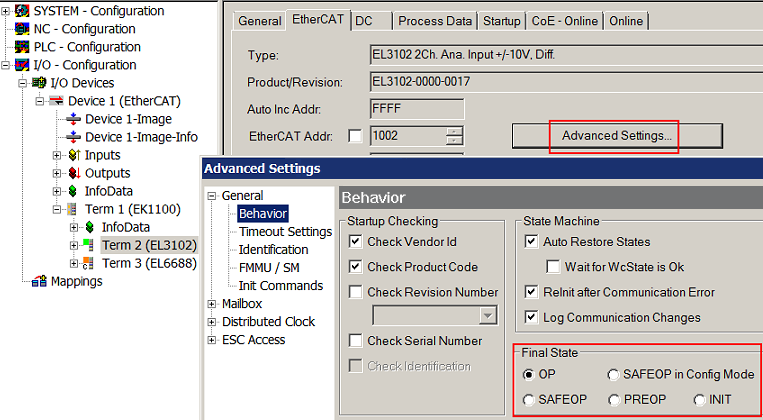
Zusätzlich kann im Dialog „Erweiterte Einstellung“ beim jeweiligen Slave der Zielzustand eingestellt werden, auch dieser ist standardmäßig OP.
Manuelle Führung
Aus bestimmten Gründen kann es angebracht sein, aus der Anwendung/Task/PLc die States kontrolliert zu fahren, z. B.
- aus Diagnosegründen
- kontrolliertes Wiederanfahren von Achsen
- ein zeitlich verändertes Startverhalten ist gewünscht
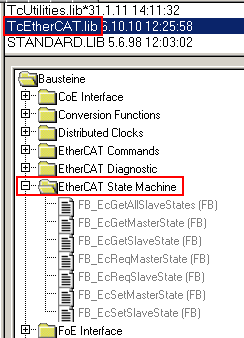
Dann ist es in der PLC-Anwendung sinnvoll, die PLC-Funktionsblöcke aus der standardmäßig vorhandenen TcEtherCAT.lib zu nutzen und z. B. mit FB_EcSetMasterState die States kontrolliert anzufahren.
Die Einstellungen im EtherCAT Master sind dann sinnvollerweise für Master und Slave auf INIT zu setzen.
Hinweis E-Bus-Strom
EL/ES-Klemmen werden im Klemmenstrang auf der Hutschiene an einen Koppler gesetzt. Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 V versorgen, i.d.R. ist ein Koppler dabei bis zu 2 A belastbar. Zu jeder EL-Klemme ist die Information, wie viel Strom sie aus der E-Bus-Versorgung benötigt, online und im Katalog verfügbar. Benötigen die angefügten Klemmen mehr Strom als der Koppler liefern kann, sind an entsprechenden Positionen im Klemmenstrang Einspeiseklemmen (z. B. EL9410) zu setzen.
Im TwinCAT System Manager wird der vorberechnete theoretische maximale E-Bus-Strom als Spaltenwert angezeigt. Eine Unterschreitung wird durch negativen Summenbetrag und Ausrufezeichen markiert, vor einer solchen Stelle ist eine Einspeiseklemme zu setzen.
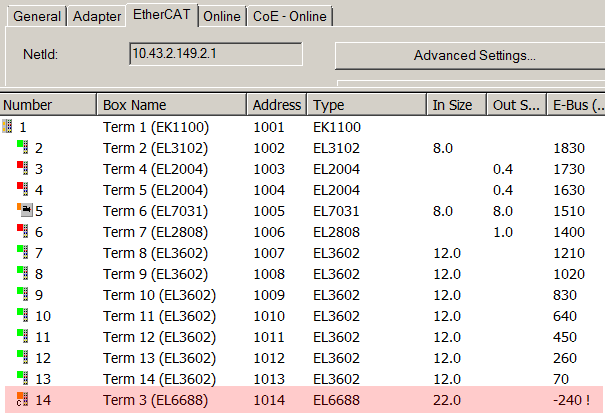
Ab TwinCAT 2.11 wird bei der Aktivierung einer solchen Konfiguration eine Warnmeldung „E-Bus Power of Terminal...“ im Logger-Fenster ausgegeben:

Hinweis | |
Achtung! Fehlfunktion möglich! Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demselben Massepotential erfolgen! |