TwinCAT System Manager
Zur Konfiguration der EL6752 DeviceNet Master-/Slave Klemme dient das TwinCAT System Manager Tool. Der System Manager stellt die Anzahl und Programme der TwinCAT SPS-Systeme, die Konfiguration der Achsregelung und die angeschlossenen E/A-Kanäle als Struktur dar und organisiert das Mapping des Datenverkehrs.

Für Applikationen ohne TwinCAT SPS oder NC konfiguriert das TwinCAT System Manager Tool die Programmierschnittstellen für vielfältige Applikationsprogramme:
- ActiveX-Control (ADS-OCX) für z. B. Visual Basic, Visual C++, Delphi, etc
- DLL-Interface (ADS-DLL) für z. B. Visual C++ Projekte
- Script-Interface (ADS-Script DLL) für z. B. VBScript, JScript, etc.
System Manager – Eigenschaften
- Verbindung zwischen Server-Prozessabbildern und E/A-Kanälen bitweise
- Standard-Datenformate, z. B. Arrays und Strukturen
- Benutzerdefinierte Datenformate
- Fortlaufende Verbindung von Variablen
- Drag und Drop
- Import und Export auf allen Ebenen
Konfiguration mit dem TwinCAT System Manager
Im Folgenden werden das Vorgehen und die Konfigurationsmöglichkeiten im System Manager beschrieben:
EL6752 - DeviceNet Master Klemme
EL6752-0010 - DeviceNet Slave Klemme
EL6752 - DeviceNet Master Klemme
Gerät anfügen
Das Anfügen der Klemme in die E/A-Konfiguration kann entweder durch die "Geräte suchen"-Routine im TwinCat System Manager durchgeführt oder durch die manuelle Auswahl des "DeviceNet Master EL6752, EtherCAT" aus den möglichen DeviceNet-Geräten eingefügt werden (Abb. Anfügen des Gerätes „DeviceNet Master EL6752, EtherCAT“). Durch Rechtsklick besteht die Auswahl aus folgendem Kontextmenü:
Karteireiter "EL6752"
Klicken Sie im TwinCAT Baum auf das "Gerät EL6752" und anschließend auf den EL6752-Reiter:
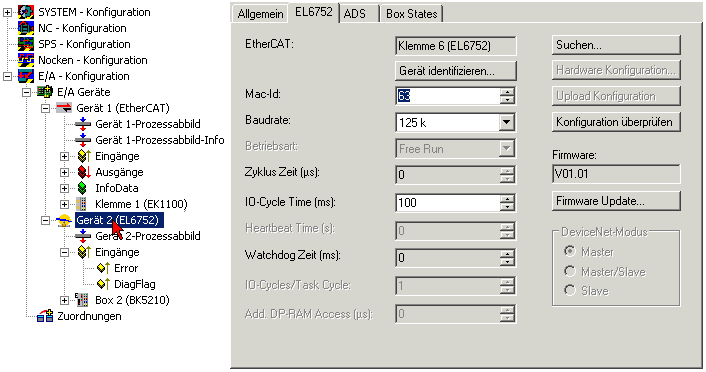
EtherCAT
Bezeichnung der Klemme im Klemmenverbund.
MAC-ID
Jedes DeviceNet Gerät - einschließlich Master - benötigt eine eindeutige Stationsnummer die MAC-ID (Medium Access Identifier) - Wertebereich: 0...63.
Baudrate
Einstellung der Baudrate: 125 kBaud, 250 kBaud oder 500 kBaud.
Zykluszeit
Hier wird die Zykluszeit der zugehörigen höchstprioren Task angezeigt. Die Anzeige wird aktualisiert sobald das Mapping erzeugt wird.
IO-Cycle time
Einstellung der Zykluszeit für die E/A Verbindungen. Dieser Wert ist der Standardwert für neu eingefügte Boxen.
Watchdog time
Zeit bis zum Triggern des Watchdogs
Suchen...
Hierüber werden alle vorhandenen Kanäle der EL6752 gesucht, und es kann der gewünschte ausgewählt werden.
Konfiguration überprüfen
In Vorbereitung.
Firmware
Hier wird die aktuelle Firmware-Version der EL6752 angezeigt.
Firmware Update...
Hierüber kann die Firmware der EL6752 aktualisiert werden. Achtung: Das TwinCAT System muss hierzu gestoppt sein.
Karteireiter "ADS"
Die EL6752 ist ein ADS-Device mit einer eigenen Net-ID, die hier verändert werden kann. Alle ADS-Dienste (Diagnose, azyklische Kommunikation), die an die EL6752 gehen, müssen die Karte mittels dieser Net-ID adressieren.
Karteireiter "Box States"
Hier wird eine Übersicht aller aktuellen Box-States angezeigt.
EL6752-0010 - DeviceNet Slave Klemme
Zunächst in der Baumstruktur der Systemkonfiguration mittels rechtem Mausklick auf E/A Geräte und "Gerät anfügen" die Auswahlliste der unterstützten Feldbuskarten öffnen.
EL6752-0010 CANopenSlave auswählen. TwinCAT sucht nach der Klemme und zeigt die gefundenen Speicheradressen bzw. Slots an. Entsprechende Adresse auswählen und bestätigen.
Fügen Sie anschließend durch Rechtsklick bei "Gerät (EL6752-0010)" die Box für die EL6752-0010 ein:
Bei Anwahl des E/A Gerätes für die EL6752-0010 in der Baumstruktur öffnet sich ein Dialog mit verschiedenen Konfigurationsmöglichkeiten:
Karteireiter "EL6752-0010"
EtherCAT
Bezeichnung der Klemme im Klemmenverbund.
MAC-ID
Jedes DeviceNet Gerät benötigt eine eindeutige Stationsnummer die MAC-ID (Medium Access Identifier) - Wertebereich: 0...63.
Baudrate
Hier wird die Baudrate eingestellt.
Zyklus-Zeit
Hier wird die Zykluszeit der zugehörigen höchstprioren Task angezeigt. Die Anzeige wird aktualisiert sobald das Mapping erzeugt wird. Die Netzwerkvariablen werden im Takt dieser Task aktualisiert.
Watchdog-Zeit
Zeit, bis der Watchdog triggert
Suchen...
Hierüber werden alle vorhandenen EL6752-0010 Kanäle gesucht, und es kann der gewünschte ausgewählt werden. Bei einer FC5102 erscheinen beide Kanäle A und B, die sich logisch wie zwei FC5101-Karten verhalten.
Firmware
Hier wird die aktuelle Firmware-Version der EL6752-0010 angezeigt.
Firmware Update...
Hierüber kann die Firmware der EL6752-0010 aktualisiert werden. Achtung: Das TwinCAT System muss hierzu gestoppt sein.
Karteireiter "ADS"
Die EL6752-0010 ist ein ADS-Device mit einer eigenen Net-ID, die hier verändert werden kann. Alle ADS-Dienste (Diagnose, azyklische Kommunikation), die an die EL6752-0010 gehen, müssen die Karte mittels dieser Net-ID adressieren. Zusätzliche ADS Net-IDs können eingetragen werden, um unterlagerte ADS Geräte (z. B. eine weitere Feldbus-Karte im gleichen PC) über die Karte anzusprechen.
Karteireiter "DPRAM (Online)"
Zu Diagnosezwecken kann lesend direkt auf das DPRAM der Karte zugegriffen werden.
Box EL6752-0010 Slave
Es wird automatisch eine Box "EL6752-0010 (DeviceNet Slave)" angelegt. Hier sind weitere Parameter einzustellen:
Karteireiter Box EL6752-0010:
DeviceNet IO-Betriebsarten
Die EL6752-0010 unterstützt die DeviceNet-Betriebsarten zyklisches Polling, Change of State / Cyclic und Bit-Strobe. Die IO-Betriebsarten können entsprechend den DeviceNet-Spezifikation selektiert werden.
Die DeviceNet IO-Betriebsart zyklisches Polling wird per Default für die EL6752-0010 selektiert:
IO-Betriebsart | Eingangsdatenlänge / Byte | Ausgangsdatenlänge / Byte |
|---|---|---|
Polling | 0 - 255 | 0 - 255 |
Change of State | 0 - 255 | 0 - 255 |
Cyclic | 0 - 255 | 0 - 255 |
Bit-Srobe | 1 Bit | 0-8 |
Polling / Change of State (COS) / Cyclic
Die Betriebsart zyklisches Polling ist charakterisiert durch ein zyklisches Abfragen bzw. Pollen der IO-Daten durch den Master. Die Betriebsart Change of State ist charakterisiert durch das ereignisorientierte Versenden der IO-Daten. In der Betriebsart Cyclic werden die IO-Daten zyklisch nach den durch den Master konfigurierten Kommunikationsparametern versendet. Da die Kommunikationseinstellungen durch den Master vorgegeben werden sind hier keine weiteren Einstellungen mehr möglich. Mehr Informationen zu den Betriebsarten sind dem Kapitel DeviceNet Kommunikation zu entnehmen. Die Einstellungen sind für die genannten Betriebsarten identisch.
Die Eingangs- und Ausgangsdatenlängen sind mit je 8 Byte vorinitialisiert:
Nach Bedarf und Applikation können weitere Eingangs- bzw. Ausgangsdaten durch Rechtsklick (Abb. Einfügen von weiteren Variablen) angefügt werden. Hierbei können beliebige Datentypen ausgewählt werden:
Die Datenlänge wird entsprechend der DeviceNet Spezifikation in ein Byte-Stream umgerechnet und auf dem Karteireiter der entsprechenden Verbindung zur Anzeige gebracht:
 | Maximale Ausgangs-Datenlänge Die maximale Datenlänge darf 255 Bytes pro Datenrichtung betragen. |
Die angezeigten Eingangs- und Ausgangsdatenlängen müssen beim zugehörigen DeviceNet-Master entsprechend konfiguriert werden.
Bit Strobe
Die IO-Betriebsart Bit-Strobe beinhaltet ein 8-Byte Kommando des Master an die Slaves. Für jeden mögliche Adresse/MAC-ID (DeviceNet Adressraum: 64) ist entsprechend 1 Bit Nutzdaten reserviert. Die Antwort-Nachricht des Slaves darf maximal 8 Byte lang sein und wird unmittelbar nach Erhalt des Bit-Strobe Kommandos an den Master gesendet.
| Maximale Ausgangs-Datenlänge Die maximale Ausgangs-Datenlänge darf 8 Bytes betragen. Die Eingangsdatenlänge ist fest vorgegeben. |
Da die Kommunikationseinstellungen durch den Master vorgegeben werden sind hier keine weiteren Einstellungen mehr möglich.